基于超声波避障的仓库安防机器人设计
编者按:仓库巡检的传统手段是结合摄像头与人员巡逻,在这种应用背景情况下,本文设计了基于超声波避障的仓库安防机器人,通过超声波模块进行避障,利用各种环境传感器采集仓库内的温度、湿度、光照、烟雾、可燃气体等信息以监测仓库内是否发生火情、是否发现可疑人员等事故,通过无线传输模块将相关数据发送到上位机和手机APP上,实现巡检与远程监测相结合,实现仓库内的智能化巡检功能。该系统可一定程度上提升仓库内的监测效率、节省人力资源,提升仓库智能化监测水平。
0 引言
安防机器人作为现在最热门的服务型移动机器人之一,具有智能化巡逻、高效灵活的特点[1],可以代替保安进行智能巡逻、移动监控作用,而且也节省了小区内多处安装摄像头的成本[2]。轮式安防机器人能实现原地转弯,非常适合小区内小道路上的行走[3]。安防机器人可作为移动监控摄像头代替保安巡逻工作,在高档小区、医院、学校等场合都适合使用[4]。安防机器人具有智能巡逻、移动监控等功能,因此对它的运动控制、视觉导航、路径规划等方面的研究具有非常重要的学术意义[5]。
本文基于相关研究现状,设计了一种基于超声波避障的仓库安防机器人移动监测系统,该系统可实现在既定的室内环境下进行全天24 h 不间断的巡逻,通过超声波模块进行避障,并且在巡逻的同时利用车载的各种环境传感器采集仓库内的温度、湿度、光照、烟雾可燃气体等信息以及监测仓库内是否发生火情、是否发现可疑人员以及监视机器人的运动状态,然后通过2.4 G 无线通信传输给远程电脑端的仓库监测系统进行相应监测信息的显示与意外事件提醒,此外管理人员还可以在手机端的仓库监测APP 上用蓝牙连接巡逻机器人,在仓库监测APP 中可以接收并显示各种仓库内的环境信息数据以及机器人的运行状态,并且还可以向机器人下达停止运动或启动运动的指令。
1 总体方案设计
本文设计一种应用环境背景为仓库、车间等室内场场所,可自动循迹导航运动的移动机器人监测平台,机器人在循迹导航过程中可以实现对室内环境信息(温度、湿度、光照值、易燃气体)的采集并通过无线通信上报给监测端,同时监测是否发现火情、是否发现可疑人员、机器人是否运动正常;管理员一方面可在PC 端即电脑端的仓库监测系统显示界面中查看相关的环境信息及机器人运动状态,也可以在手机端的仓库监测APP 界面中查看相关信息,并且在手机端可以实现对机器人运动的控制(停止运动、启动运动)。
机器人系统总体设计包括三大部分:机器人运动、信息采集、上下位机通信及显示。机器人运动部分负责控制机器人的运动,包含电机CAN 总线通信、PID 闭环控制、循迹运动;信息采集部分负责采集机器人周围的环境信息数据,包含火焰传感器、人体红外传感器等相关信息采集传感器;上下位机通信及显示部分负责对环境信息的发送与接收并对数据信息进行解析显示,包含2.4 G 无线通信、蓝牙通信、电脑端的LabVIEW 显示、手机APP 端显示。系统的总体设计框架如图1 所示。

图1 系统总体设计框架
2 系统硬件设计
2.1 STM32最小系统模块
主控器件是系统中最为关键的模块,需要较小的体积、较低的功耗和较强的性能。综合考虑本次设计基于超声波避障的仓库安防机器人选用STM32F103RCT6 处理器,其主要功能是将传感器测得的数据进行处理、分析,并将相关参数数据打包通过串口无线透传通信发送给上位机。
2.2 循迹导航模块
本文运用的AGV 机器人大多采用磁导航模式,通过车身前端的AGV 磁导航传感器,使机器人沿着铺设在路面上的磁条导线进行循迹运动,磁导航传感器如图2所示。

图2 磁导航传感器
2.3 超声波避障模块
本次设计选用的是HC-SR04 超声波测距传感器,用于实现机器人在巡逻过程中的避障功能。目前市场上的超声波测距传感器模块品种繁多,其中HC-SR04 超声波模块所测量的范围比较宽,测量时准确率也比较高,是一种属于不同接触式的测量传感器。超声波的穿透能力强,具备优良的穿透能力,被广泛应用在测距技术领域。超声波测距传感器由超声波发射器、超声波接收器以及控制电路组成,该模块的实际有效测距距离为(2~400)cm,测距精度可达3 mm,测量角度为15° ,满足现实使用需求。
假设1 个普通的超声波在1 个可以发射的地点与其他交通障碍物之间定向进行时,往返定向定位传播所用的定向运动持续时间大约设定为ΔT, 超声波在一个密闭低温空气中的环境系统中的进行往返定位传播定向运动时的速度大约设定为V, 则利用超声波测距仪的计算公式可对其定义为:
![]()

图3 超声波避障模块
2.4 环境传感器
机器人在进行循迹巡逻的过程中,通过搭载的火焰传感器、人体红外传感器、MQ-2 烟雾可燃气体传感器、DHT11 温湿度传感器以及GY-30 光照传感器来采集仓库内的温度、湿度以及光照值信息,同时监测是否发生了火情、是否发现有可疑人员存在、仓库内是否存在可燃气体超标情况。这些信息通过无线传输,上传到上位机监测平台,供管理员使用,以及为其预警。环境信息采集如图4所示。

3 软件设计
3.1 底层运动系统软件设计
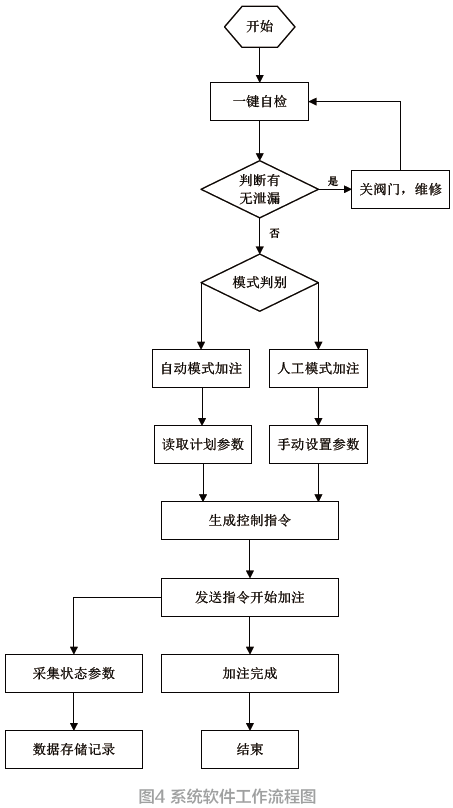
底层运动系统的软件设计如图5 所示,控制核心是STM32 单片机,其上连接激光雷达用于避障运动,连接7 个循迹模块用于循迹运动,连接CAN 模块用于控制电调,进而控制电机运动。进入程序后先进行各个子程序的初始化,然后进行循迹信息及避障信息的采集,信息采集完成后进行数据处理,控制电机相应转动,达到循迹避障的目的,同时将电机的运转状态发送给发送端单片机,发送端单片机进而通过无线通信将运动状态上传给电脑端和手机端;STM32 单片机同时通过I/O 口检测发送单片机是否发送来对机器人运动的控制指令,若收到控制指令,则执行对应的停止或开始命令,若为收到控制指令,则返回执行循迹避障程序。

图5 底层运动软件设计流程图
3.2 PC端上位机设计
巡逻机器人通过车载的2.4 G 通讯模块NRF24L01与远程的另一块单片机通信,而接收到相关信息的此单片机再通过串口与电脑端即PC 端进行数据上报,PC 端通过串口通讯接收到数据后,通过LabVIEW 软件进行数据的显示以及相应的警示功能。下位机与PC 端上位机设计如图6 所示。

设计的LabVIEW 程序框图如图7 所示,系统分为初始化、等待、接收数据、数据处理、退出五大模块,通过不同的条件标志来切换不同模块。程序开始时先进性初始化(默认值的设置、显示控件的清除、指示灯的关闭等);然后进入等待模式,等待接收数据(串口开关触发)或阈值设置;触发事件后进入到数据处理模块,进行解析数据以及数据的显示或设置阈值,事件处理完后返回到等待模块;当触发停止标志(停止开关)时进入到退出模块,在此模块中关闭所有指示灯、清除显示,退出While 循环,结束程序。

图7 LabVIEW上位机程序设计
当程序运行开始运行时,首先进行初始化操作,即配置一些默认的参数(如阈值、波特率等);然后打开串口资源接收数据,数据包为22 位一包,当接收到数据包后进行数据的解析,将6 个环境信息以及机器人的运动状态信息拆解出来;而后对各个传感器的数据进行数值显示、波形图显示及机器人运动状态的显示;同时还可以对温湿度进行阈值的设置,当温湿度超过阈值时进行灯光的警示。设计好的PC 端界面如图8 所示。

图8 LabVIEW面板设计
3.3 手机端APP设计
组件设计包含8 个静态显示标签(“欢迎使用”、“火焰监测”、“人员监测”、“烟雾监测”、“湿度(%)”、“温度(℃)”、“光照(lx)”、“运动状态”),8 个动态显示标签(蓝牙连接状态、火情显示、人员显示、烟雾值、湿度值、温度值、光照值、机器人运行状态),3 个按键(断开连接、停止、启动),1 个列表选择框(蓝牙选择),组件设计如图9 所示。

图9 APP组件设计
4 系统测试
本系统可基本实现机器人基于AGV 的导航运动、基于超声波模块的避障,各种环境信息的采集、数据的无线通信传输、PC 端LabVIEW 监测页面的信息显示以及下位机与手机端上位机的蓝牙通信、手机端APP 的数据信息。
最终完成后的机器人如图10、图11 为机器人所示,图12 为正在循迹中的机器人,图13 为电脑端与手机端的监测实况图。

图10 最终实物图

图11 最终实物图

图12 循迹实况

图13 上位机监测实况
在实际测试中,PC 端上位机可以稳定接收数据并进行显示、提示等功能,如图14 所示为PC 端上位机的运行效果。

图14 PC端上位机运行效果图
将APP 安装包下载到手机上并进行安装,蓝牙设备连接成功后接收并显示从下位机发送的传感器数据。火焰传感器探测到火源后进行红色文字警示“发现火情”,人体红外传感器发现仓库有人时进行红色文字警示“发现可疑人员”,机器人运行监测模块在机器人运行停止时进行红色文字提示“运动已停止”。并且在手机端上用户可向下位机发送停止或启动的运动指令。

图15 蓝牙连接成功后的页面显示
5 结束语
本文对基于超声波避障的仓库安防机器人的设计和实现进行了相关的研究和分析。进行了基于超声波避障的仓库安防机器人的总体方案设计。将系统硬件部分分解成多个硬件模块组合,有STM32F103RCT6 最小系统、AGV 导航模块、超声波避障模块、环境检测模块、无线传输模块。完成硬件搭建后,设计了电脑端的上位机和手机APP,经过系统测试验证了该安防机器人监测系统的有效性以及终端数据的成功传输。实现了仓库内的智能化巡检,提升了仓库智能化监测水平。
参考文献:
[1] 吴绪辉,黎镜林,郭锐坤,等.电机PID闭环系统在智能小车上的应用[J].物理通报,2019(11):123-125.
[2] 祝相泉,黄海龙,田昊.无刷直流电机模糊PID控制[J].辽宁工业大学学报(自然科学版),2020,40(1):22-24.
[3] 刘长文.仓库安防巡检机器人关键技术研究[D].沈阳:沈阳大学,2018.
[4] 王威,陈巍,路琴心.基于GPS+激光雷达的变电站巡检车混合导航研究[J].自动化应用,2019(4):95-99.
[5]唐飞龙,张娜,黎安庆.基于STM32控制系统的轮式移动机器人设计与实现[J].2020,16(25):47-49.
(本文来源于必威娱乐平台 杂志2023年2月期)

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码