精密MEMS传感器实现新型导航应用
简介
用于室内导航以及处理复杂、具有环境挑战性的情况时,传感器可改善系统区分实际运动与异常运动的能力。
导航通常与汽车、飞机及船舶相关。然而,在工业和医疗保健领域,精密导航正日益广泛地运用于从工厂机械和手术机器人到应急响应跟踪的各种应用。现有多种与定位、转向和引导设备相关的方法,可用于获得位置、方向和运动信息。事实上,许多应用已普遍依赖于GPS(全球定位系统)。然而,当涉及到室内导航以及处理更复杂、更具环境挑战性的情况时,单靠GPS已无法满足需求。
针对上述应用,可使用各类传感器来改善系统区分实际运动与异常运动的能力。某一传感器处理特定导航问题的能力不仅取决于该传感器的性能水平,同时也取决于该应用特有的动态特性。和处理所有复杂设计问题一样,首先需要了解最终应用的目标和限制,由此可将各项关键性能参数进行排序,从而大致了解所需的传感器,然后通过仔细的传感器调理、集成和处理,对实际设计进行优化。
了解导航问题
我们首先来打一个比方:假设您正在工作,想来杯咖啡,于是您起身去找咖啡壶。如果您之前去过放咖啡壶的地方,您的脑海中就会形成一条路线。不过,沿途您还需依靠各种感知,包括视觉、听觉、平衡,甚至触觉等,才能到达该位置。您自身的处理器会结合使用各种感知来源,以及某些嵌入式的模式识别,如果运气不好,您可能还得暂停下来,寻求一些外部输入,即方向。在整个过程中,您所依赖的自身传感器不仅需要逐个保持精确,还必须默契配合,必要时可拒绝误导信息(旁边隔间飘来的咖啡味道),并寻求其它传感器的帮助。在抵达目的地的过程中,您所采用的技术与车辆、手术仪器和机器人导航系统的设计人员使用的技术并无不同。
将上述例子扩展到工业领域,会涉及到多种传感技术,而这些技术中,无一能够独力满足大多数应用需求。正如此前所提及的,由于障碍物会阻挡卫星接收,GPS容易出错,要么降低总体精度,要么降低更新速率。另一种常见的导航辅助设备是磁力计,它需要畅通无阻地访问地球磁场,虽然这一条件通常可以实现,但工业环境中还存在许多现场干扰,使得磁力计的可靠性不尽如人意,能间歇性保持可靠运行已属万幸。光学传感器会遇到视线遮挡问题,虽然惯性传感器通常不受这些干扰影响,但也有某些自身的局限性,例如缺乏绝对参照(哪个方向是北?)。表1列出了各类主要导航传感器的相对优势和潜在问题。
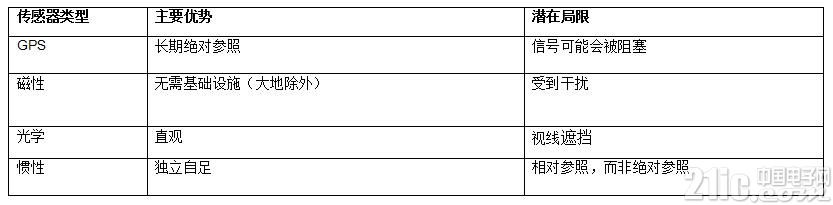
表1. 传感器的优势/局限
传感器的选择与处理
除了解决最简单的问题外,大多数解决方案都依靠多种类型的传感器来提供各种条件下所需的精度与性能。惯性传感器,例如基于微机电系统(MEMS)的加速计和陀螺仪,有潜力完全弥补其它传感器类型的缺点,因为此类传感器可以避免诸多干扰,而且不需要外部基础设施(无需卫星、磁场、相机…只需要惯性)。
MEMS惯性传感器可靠性高(在汽车行业拥有20年的应用历史),功耗低,尺寸小,它在手机和视频游戏领域的成功应用充分表明,它具有很强的商业吸引力。然而,不同器件的性能水平大不相同,适合游戏的器件并不能解决先前所述的高性能导航问题。例如,精密工业和医疗导航所需的性能水平通常比消费电子设备所用MEMS传感器的性能水平高出一个数量级。
在大多数情况下,器件的运动较为复杂(超过一个轴),因此需要使用全惯性测量单元(IMU)。IMU可集成多达6自由度的惯性运动检测——三个线性自由度、三个旋转自由度(见图2)。
例如,ADI公司的ADIS16334 iSensor IMU具有解决大多数工业导航问题所需的集成度和性能,设计紧凑,适用于众多工业仪表及车辆(见图1)。很多情况下还能集成4个或4个以上的额外自由度,包括三轴磁性检测、单轴压力(高度)检测。

图1. 6自由度运动检测,采用11 mm × 22 mm ×33 mm封装
正如此前所描述的,任何类型的传感器都有其局限性,如果这些局限性对系统性能目标产生影响,设计人员可以在采用补偿技术的同时合并多种类型的传感器。例如,惯性测量单元输出高度稳定的线性和旋转传感器值,可对下列影响进行补偿:
• 温度和电压漂移
• 偏置、灵敏度和非线性度
• 振动
• X、Y、Z轴对准误差
惯性传感器的质量不同,漂移度也不同,有时也可使用GPS或磁力计来纠正该漂移。除了良好的传感器设计外,导航应用的核心挑战在于确定要依靠哪些传感器以及何时依靠这些传感器。惯性MEMS加速计和陀螺仪的应用已证明,它们是良好的补充手段,有助设计人员设计出功能完善的检测系统。
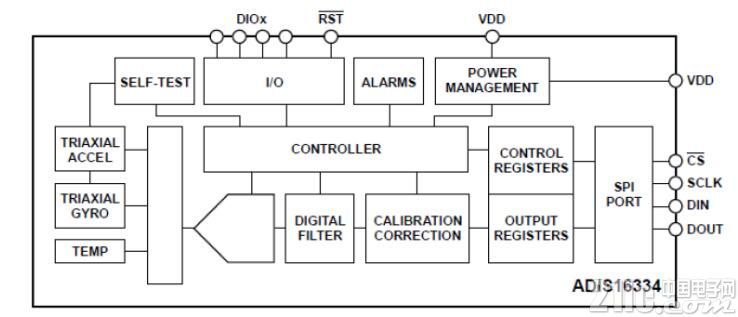
图2. 惯性测量单元捕捉复杂多轴运动
使用MEMS惯性传感器进行设计
在工业或医疗室内环境中,没有GPS信号,却存在机械、电子方式引起的磁干扰,设计人员必须建立较为新颖的机械导航方法。很多新兴应用(如手术工具导航)所需的精度水平大大高于汽车导航等要求。在这些情况下,可选用惯性传感器,此类传感器可在视线遮挡或存在对非惯性传感器有不利影响的其它干扰源时,提供保持精度所需的航位推算导航。
图3显示了一种通用惯性导航系统(INS),可用于车辆、飞机、手术工具等任何设备的导航。INS型号中包含了一个卡尔曼滤波器,该滤波器在阿波罗登月计划中首次使用,目前广泛应用于移动通信中的锁相环。它提供的机制可合并多个有优点、但并不完美的传感器,从而最有效地估算出位置、方向和整体运动动力学特性。
在手术应用中,INS可用作导航辅助设备,以根据病人的独特身体特征,将人造关节(例如膝关节或髋关节)进行对准。除了改善对准效率以提高舒适度,并实现更快、更无创的手术之外,使用正确的传感器还有助于防止手颤、减轻疲劳。近年来,光学对准已成为了纯机械对准的补充手段,然而,就和车辆导航中的GPS遮挡问题一样,手术室中也有潜在的视线遮挡问题,会限制光学传感器的精度。惯性导航的手术对准工具不存在视线问题,同时还在尺寸、成本、自动化方面具有潜在优势,因此可为光学导航提供补充,甚至取而代之。
虽然解决导航问题的基本原理在不同应用中都是一致的,但必须充分了解终端系统的具体特性。这些特性最终会影响合适的传感器类型的选择,还会影响整体性能。
在消费应用强烈追求小尺寸、低功耗、多轴惯性传感器的同时,某些传感器开发人员同样高度重视可用于各种条件下的高精度、低功耗、高性能紧凑型传感器。这些高精度、环境适应能力极强的传感器正在不断发展,这一趋势在工业、仪器、医疗市场掀起了新一轮的MEMS惯性传感器应用浪潮。
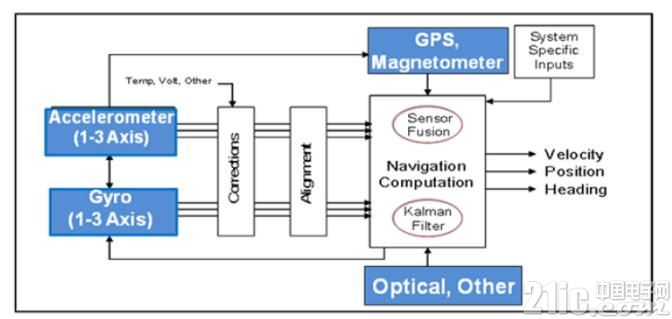
图3. 惯性导航系统,在卡尔曼滤波器的辅助下合并多种类型的传感器

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码