辅助驾驶: 汽车离道报警完整结构设计
第一部分:设计概述
安全辅助驾驶(Safety Driving Assist,简称SDA)是当前国际智能交通系统研究的重要内容,它主要解决交通安全的问题,对于困扰运输领域的交通堵塞及环境污染两个问题也有缓解作用。基于此,世界上很多国家都在加强车辆安全辅助驾驶技术领域的研究。关于安全辅助驾驶技术的研究主要集中在车道偏离预警,前方障碍物探测,以及驾驶员状态监测等方面。近20年来,车道偏离预警系统作为安全辅助驾驶研究领域的一个组成部分,已经受到越来越多的关注,很多国家都投入大量的人力、物力和财力进行系统研发。
车道偏离预警系统研究背景:
车道偏离报警系统( Lane Departure Warning System, 简称LDWS)是指汽车在高速行驶的过程中,在驾驶员没有示意车辆变道的情况下,车辆偏离了正常行驶的车道时, 利用报警方式提醒驾驶员修正车辆方向的汽车主动安全装置。车道偏离报警系统将会是继安全带、安全气囊后,在汽车内安装的又一项安全装置。在美国,1994 年由于车道偏离引起的伤亡事故占所有车辆伤亡事故的37.0%, 2000 年为42.0%, 2001 年则上升到43.0%, 平均每年上升0.75 个百分点。车道偏离报警系统在车辆偏离车道线时, 可以向驾驶员发出警示信号, 提示驾驶员修正车辆的方向, 提醒驾驶员集中注意力。有研究表明,车道偏离报警系统可以减少至少24%的车道偏离伤亡事故。世界上一些国家已经成功研制出一些各具特色的车道偏离报警系统, 如Auto Vue 系统、AWSTM系统、DSS 系统、SCARF 系统和ALVINN 系统等。在我国,车道偏离报警方面的研究起步较晚,还没有相关的产品问世, 只有吉林大学的汽车动态模拟国家重点实验室、东南大学仪器科学与工程学院进行了一些探索性的研究。经过探索性的研究表明, 基于视觉的车道偏离报警系统是一种切实可行的方案。
MicroBlaze嵌入式软核是一个被Xilinx公司优化过的可以嵌入在FPGA中的RISC处理器软核,具有运行速度快、占用资源少、可配置性强等优点,广泛应用于通信、军事、高端消费市场等领域。Xilinx公司的MicroBlaze 32位软处理器核是支持CoreConnect总线的标准外设集合。MicroBlaze处理器运行在150MHz时钟下,可提供125 D-MIPS的性能,非常适合设计针对网络、电信、数据通信和消费市场的复杂嵌入式系统。
设计摘要:
本课题是以Xilinx公司FPGA开发板上的MicroBlaze微处理器IP核为核心,和其它外设一起,针对于行驶在高速公路或者城市道路上的司机,设计出了汽车离道报警系统。该系统图像采集子系统、FPGA开发板和其他设备组成。图像采集子系统能实时地采集路面实况数据,数据进入系统后,它被实时地变换成可处理的格式,在处理器内部,首先进行预处理,过滤掉图像捕获期间混入的噪声,然后探测车辆相对于车行道标志线的位置。道路图像的输入信息流被变换为一系列画出道路表面轮廓的线条。在数据字段内寻找边缘就能发现车道标志线。这些边缘事实上形成了车辆向前行驶应保持的边界。处理器则要时刻跟踪这些标志线,以确定行车路线是否正常。一旦发现车辆无意间偏离车行道,处理器作出判断后输出一个信号驱动报警电路,让驾驶员立即纠正行车路线。报警电路采用蜂鸣器放出警告声音。
第二部分:设计结构
1.系统框图介绍
不管是哪一种车道偏离报警系统,都可以划分成三个基本模块:道路和车辆状态感知模块、车道偏离评价算法模块和信号报警电路,如图1所示系统运行的基本过程是:状态感知模块感知道路几何特征和车辆的动态参数,然后由车道偏离评价算法对车道偏离的可能性进行评价,一旦发现车辆无意间偏离车行道,处理器作出判断后输出一个信号驱动报警电路,让驾驶员立即纠正行车路线。报警形式可以是蜂鸣器或者喇叭,也可以用语言提示,还可以用振动座椅来提醒驾驶员。

图1 系统设计框图
车道偏离报警系统具体在硬件上则是通过装在车上的摄像头进行视频图像的采样,然后对表现为模拟信号的视频图像进行数字转换,将数字的视频信息传输给处理器单元,处理器单元根据算法要求进行计算,得出车辆偏离车道的实时状态,如果出现车道偏离或者将要出现车道偏离,系统将通过报警电路对驾驶员进行提示报警,防止意外发生。
2.硬件框图
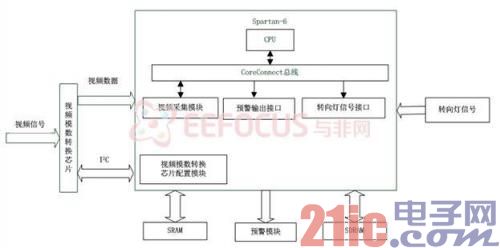
图2 硬件框图
3.软件流程图
软件流程图如图3所示
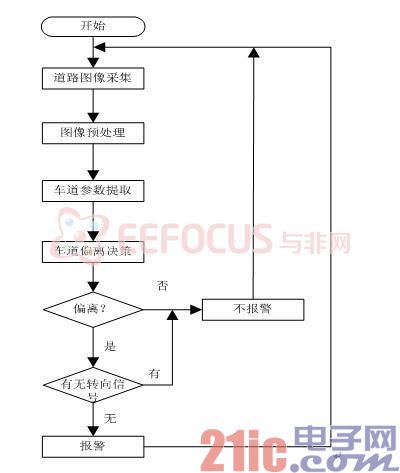
图3 软件流程图
1.道路图像采集
本文主要研究车道线检测技术在车道偏离预警中的应用,图像在采集过程中,光照强度、障碍物遮挡、路边树木以及路面不平坦而导致的摄像头抖动都会对图像中车道线信息造成影响。因而,要想准确地提取出车道线参数,就必须对采集的道路图像在车道线检测之前进行预处理。在图像处理算法中,没有哪一种算法可以适用于各类图像,每一种算法都有自己的局限性。因此,在实际应用中,需要做大量的实验,并结合车道偏离预警系统的需要,选取适合该系统的算法。适用于本文检测算法的路面为摄像机视野上方可能会为天空或高山等背景的至少含有两个同向以车道线隔开的高速公路和城市道路。
2.图像预处理
根据投影理论,当摄像机光轴与地平面平行时,而车辆一般在下方的地面部分,因此图像下半部分有车辆的区域才是我们的感兴趣区域,只需要分析这部分的情况即可,预处理中一般把图像的下半部分划分为感兴趣的部分,而上半部分一律作黑色处理,从而使得预处理后的白色部分所表示的信息即为车道线。这样既较好地符合实际情况,同时算法简便,避免了处理大量信息的冗余,提高了计算速率。预处理分四步完成:
a.灰度化。这里之所以进行灰度化,是因为石子沥青路面为深黑色,而黄线为浅色,灰度化以后,二者在图像上就表现为一黑一白,易于操作,也便于后面的处理。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
