一种基于四旋翼飞行器的煤矿井下应急救援系统的设计与研究
煤矿事故的应急救援根据事故灾害的类型、事故可能引起的破坏程度和事故地点的实际环境采取相应救援方案和救援装备,达到真正的应急救援效果。目前,已经研制成功的救援机器人主要有多履带式机器人、腿轮式机器人、蛇形机器人和蛛行机器人等,在灾害救援中起到了重要作用。但是,在井下灾害现场,地面越障机器人的通过难度较大,有一定的局限性,不能完全满足救灾的需求。为进一步完善应急救援系统,开发有效的技术和装备,本文提出了一种基于四旋翼飞行器的煤矿井下应急救援解决方案。在本方案中以四旋翼飞行器作为载体,动态的建立无线网络通信信道,将事故地点的环境情况如瓦斯浓度、一氧化碳浓度、温度等参数和灾害地点的视频画面实时的通过无线信道传送至救援指挥中心,提供较好的救援依据。
1 救援系统的组成
四旋翼飞行器的煤矿井下应急救援系统由调度指挥中心、四旋翼飞行器、无线传输链路节点、布放装置和数据采集终端组成。系统的框图如图1所示。指挥调度中心主要负责对灾难现场实际环境参数和现场视频的接收、过程控制、制定救援任务的具体方案和救援指导。
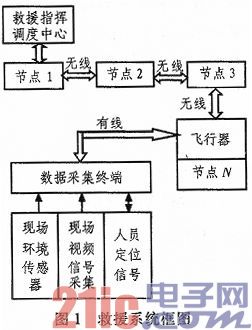
四旋翼飞行器主要完成无线传输链路节点的运输和投放、现场视频采集、灾害现场环境参数采集和人员定位信息的动态搜索,同时将采集到的数据信息发送给无线传输链路
节点,无线传输链路节点以接连传递方式将数据传送至指挥调度中心。
无线传输链路节点完成数据的上发和下发任务以及人员识别卡的搜索功能。指挥调度中心将控制指令发送给链路节点,链路节点以接力传递的方式发送到远处的节点,控制四旋翼飞行器的飞行,同时将灾害现场的参数以接力的方式传送回指挥调度中心。
布放装置负责将飞行器携带的通信节点投放到合适的通信地点。
数据采集终端以四旋翼飞行器作为载体,完成现场环境参数如瓦斯、一氧化碳、二氧化碳、氧气和温度等参数的采集,现场视频画面的采集和人员定位信息的动态搜索。
2 指挥调度中心
指挥调度中心负责对灾难现场实际环境参数和现场视频的接收、过程控制、制定救援任务的具体方案和救援指导。过程控制包括对飞行器飞行姿态的控制。飞行器的控制由遥控器完成,本设计中的遥控器的设计采用Zigbee技术,Zigbee模块具有价格低廉、传距离远、抗干扰性强、功耗低、稳定性强和操作简单等优点。
3 四旋翼飞行器的控制与应用
四旋翼飞行器是一种电动的、能够垂直起降的、多旋翼式遥控自主飞行器。与常规的旋翼式飞行器相比较,结构紧凑简单,不需要专门的反扭矩桨板,升力大。四旋翼飞行器能够垂直起降自由悬停,所以可适应各种速度及各种飞行剖面航路的飞行状况,并且起飞着陆场地面积要求小。飞行器飞行高度为几米到几百米,飞行速度为每秒几米到几十米,能钻到建筑物或洞穴隧道内执行侦察任务。此外四旋翼飞行器还具有体积小、重量轻、成本较低、拆卸方便、易于维护、飞行高度低、具有很强的机动性等,特别适合应用于煤矿应急救援任务中。
随着新型材料、微机电(MEMS)、微惯导(MIMU)、微处理(MCU)器技术、聚合物高密度电池技术以及飞行控制等技术的进步,微小型四旋翼飞行器得到了迅速发展,对广大科研
人员具有很强的吸引力,成为国际上新的研究热点。目前,世界上对四旋翼飞行器的控制研究主要集中于3个方向:基于惯性制导的自主飞行控制、基于视觉的自主飞行控制和自主飞行控制系统方案。
本文中采用基于视觉的自主飞行控制方式,将装载在飞行器上摄像头采集视频画面,实时传送给指挥调度中心,指挥调度中心根据实际的视频画面控制飞行器在煤矿井下的飞行轨迹,同时飞行器在上下和前左右装有距离探测模块,实现自主壁障功能,自主壁障功能优先级优于指挥调度中心发来的指令,保证飞行器的绝对安全。飞行器飞行姿态由三轴加速度传感器进行采集,实时反映4个旋翼的转速和整机机身的姿态,实现对4个直流电机的闭环控制。
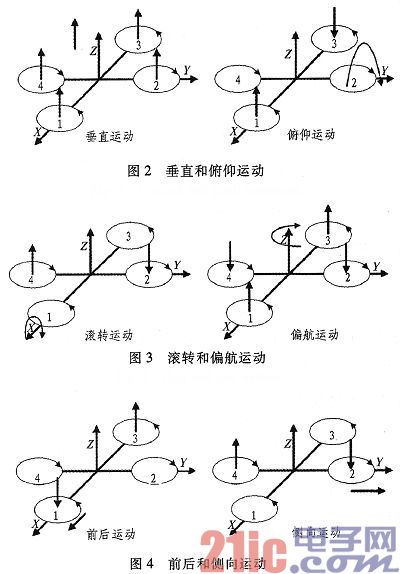
四旋翼飞行器的设计的关键内容为飞行器飞行姿态的控制方法。四旋翼飞行器具有空间六自由度,而只能通过调节4个旋翼的转速来实现飞行控制,显然它是一个欠驱动系统(控制输入向量构成的空间维数小于位形空间维数的系统)。如图2~图4所示,通过控制4个电机的转速,即可以分别实现飞行器6个自由度的控制。
目前关于各种欠驱动系统模型的控制方法的研究有很多,其中研究成果最为丰硕的几种控制方法有:反步法(Backstepping)、线性最小二次型控制(LQR)、滑模控制(Sliding Mode)、神经网络自适应、反馈线性化以及H∞控制等。其中应用最多的是反步法。反步法主要基于Lyapunov理论,Lyapunov方法适用于任何形式的状态空间模型,单变量、多变量、线性、非线性、时不变、时变、连续、离散等。
4 无线传输链路节点
无线传输链路节点以无线接力方式传送数据,完成数据的上发和下发任务以及人员识别卡的搜索功能,是构建井下无线网络通信信道的关键点。无线传输链路节点由电池、主控部分和无线部分组成,组成框图如图5所示。
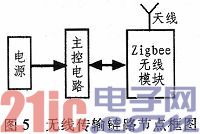
电池采用小体、积高密度的聚合物电池,主控部分完成对接收数据处理和转发以及对人员识别卡的搜索。主控部分采用基于Codex—M3内核的低成本、体积小、高性能和低功耗的32为微处理器芯片,如飞利浦系列芯片和ST公司的STM32系列芯片,其中LPC系列部分芯片处理速度可达100MHz到120 MHz,完全能够满足大数量的高速处理。无线部分采用一款以CC2530F256为主控芯片的核心板的zigbee无线模块,具有高性能、功耗低的优点并具有以下特点:
1)通信距离超过350m;可靠通信距离超过250 m;可自动重连通信距离超过120 m(工作环境:空旷区域)
2)工作频段:2.4 GHz
3)工作电压:2.0~3.6 V
4)温度范围:-40~85℃
5)串口波特率:38400 bps(默认),可设为其他波特率
6)体积:26 mm x 27 mm(PCB)
7)节点:可配置为Coordinator、Router、ICndDevice。
5 布放装置
布放装置上装载有若干个无线传输链路节点,固定在四旋翼飞行器上。指挥调度中心遥控的控制指令通过无线接力建立的数据传输网络发送给布放装置,控制布放装置在合适的位置布放通信节点。
6 数据采集终端
数据采集终端通过固定于四旋翼飞行器之上,由人员定位识别卡读卡器、图像采集模块和各种环境参数传感器如瓦斯、一氧化碳、二氧化碳、氧气和温度等组成。数据采集终端能够实时的采集飞行器侦测位置的实际环境参数,可以到达救援人员无法到达的危险现场和地点。数据采集终端将采集到的数据通过无线的方式发送给最近的通信节点,再以接力方式发送给救援指挥调度中心。数据采集终端所有数据采集传感器设备均采用简化功能类型的设备以降低功耗和减轻四旋翼飞行器的载重重量。
在数据采集终端的设备中,图像采集模块传送的数据量最大,占用信道资源也最大,造成无线发送的消耗也越大,为此,可以选用清晰度较低的摄像头,通过图像增强算法如空间域(如中值滤波、图像平滑和图像锐化等)或频率域(如频率域低通滤波和高通滤波等)图像增强算法将图像处理较为清晰。
7 快速建立信道的方法
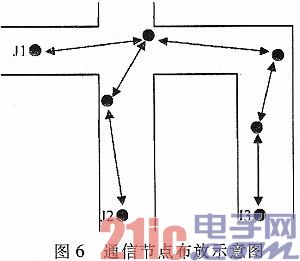
无线传输链路节点在适当位置的投放由救援指挥调度中心进行控制,飞行器在向前飞行的过程中,不断地发送飞行器与上一无线传输链路节点通信信号的强度,当通信的信号强度(RSSI),达到设定极限值时,指挥调度中心发出投放通信节点的指令给飞行器上的投放终端,此时飞行器悬停并投放通信节点。由于煤矿井下交通环境复杂,需要根据摄像头实时传回的画面投放通信节点。如巷道交叉处或巷道转弯处,以保证交叉和转弯处信号的传输质量。如图6所示,由J1到J2和J3通过放置无线节点实现信息无线接力传递。根据通信节点的投放顺序,为每个节点依次以递增的方式编号,飞行器向指挥调度中心发送数据时,按大编号节点向小编号节点发送数据;向飞行器发送指令时,小编号节点向大编号节点发送数据。
8 结论
研制煤矿井下救援的设备具有重要的现实意义和紧迫性,四旋翼飞行器应急救援系统能够满足灾难现场复杂的环境,先于救援人员快速的到达灾害地点,提供有效的救援信息,为井下救援提供依据。与地面越障式救援机器人相比,四旋翼飞行器具有更为广阔的应用空间和前景。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码