基于stm32f4的三维旋转显示平台
现实的世界是一个拥有宽度、高度和深度的三维立体世界。在平面二维显示技术已经成熟的今天,三维立体显示技术首当其冲的成为了当今显示技术领域的研究热点。
本作品搭建了基于stm32f4的三维旋转显示平台,它的显示原理属于三维显示中的体三维显示一类。它是通过适当方式来激励位于透明显示体内的物质,利用可见辐射光的产生三维体像素。当体积内许多方位的物质都被激励后,便能形成由许多分散的体像素在三维空间内构成三维图像。
体三维显示又称为真三维显示,因为他所呈现的图像在真实的三维空间中,展示一个最接近真实物体的立体画面,可同时允许多人,多角度裸眼观看场景,无序任何辅助眼镜。
本作品的特点在于,利用stm32f4的浮点运算能力,实现了低成本的体三维显示数据的生产,并利用类似分布式处理的系统结构,满足了体三维显示所需要的巨大数据吞吐量,等效吞吐量可达约300Mb/s
1.系统方案
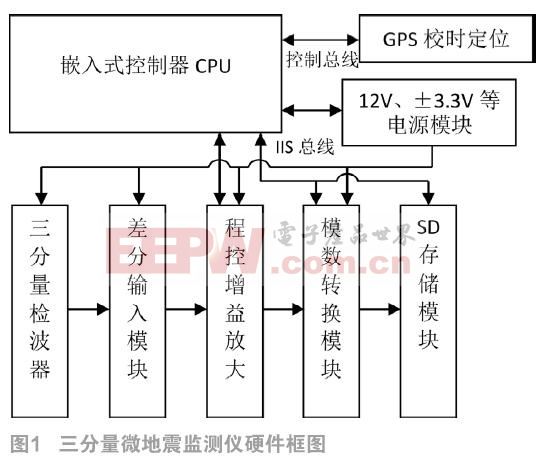
众所周知人眼在接收被观察物体的信息时,携带物体信息的光信号通过人眼细胞及神经传入大脑神经,光的作用时间只是一个很短暂的时间段,当光的作用时间结束后,视觉影像并不会立即消失,这种残留的视觉称“后像”,视觉的这一现象则被称为“视觉暂留”( duration of vision)物体在快速运动时, 当人眼所看到的影像消失后,人眼仍能继续保留其影像0.1---0.4秒左右的图像。在空间立体物体离散化的基础上,再利用人眼视觉暂留效应,基于LED阵列的“三维体扫描”立体显示系统便实现了立体显示效果。如图1所示,以显示一个空心的边长为单位1的正方体为例。LED显示阵列组成的二维显示屏即为正方体每个离散平面的显示载体,LED显示屏上的被点亮的LED即为正方体的平面离散像素。我们将该LED显示平面置于轴对称的角度机械扫描架构内,在严格机电同步的立体柱空间内进行各离散像素的寻址、赋值和激励,由于机械扫描速度足够快,便在人眼视觉上形成一个完整的正方体图像。图1(a)所示为立方体0度平面二维切片图,图1(b)所示为立方体45度平面二维切片图,图1(c)所示为立方体135度平面二维切片图,图1(d)所示为立方体180度平面二维切片图,图1(e)所示为观看者观察到的完整立方体显示效果。
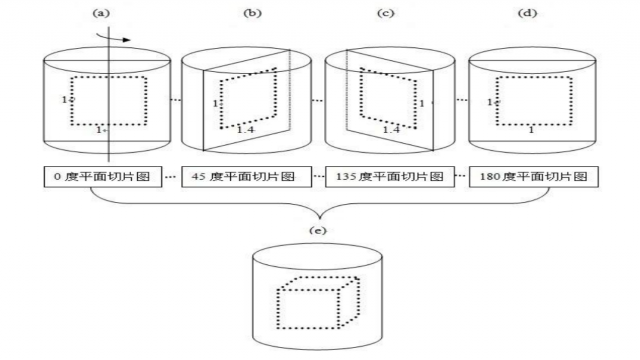
图1
系统方案如图2所示,整个系统由四个模块组成,其中数据获取单元主要由在PC上的上位机完成,利用3D-Max,OpenCV,OpenGL,将三维建模数据转化成三维矢量表述文件,传给由STM32F4 Discovery开发板构成的控制单元,利用其上的角度传感器,结合wifi模块或以太网模块通过电力线模式传给LED旋转屏单元,其中的STM32F4负责将ASE文件解析成LED显示阵列所需的点云数据流,通过串行总线传输给由FPGA驱动的LED显示阵列,通过LED刷新速率与机械单元旋转速率相匹配,从而实现体三维显示的效果。
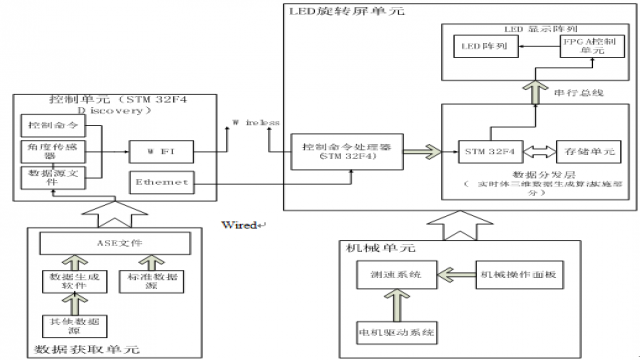
图2
2.系统硬件设计
系统的机械部分如图3所示,显示面板的硬件结构如图4,图5所示。本系统的底部是直流电机和碳刷,直流电机主要负责带动上层的显示屏幕高速旋转,而碳刷则负责传递能量和通信信号。在显示屏幕的正面是由96*128构成的三色LED点阵,FPGA的PWM信号通过驱动芯片控制三色LED从而实现真彩显示。在屏幕背面由多块STM32F4,SD卡,FIFO构成,主要负责解析由控制单元传过来的ASE文件,并实时生成体三维显示数据,并传给LED灯板的驱动FPGA,并通过其实现最终的图像显示。
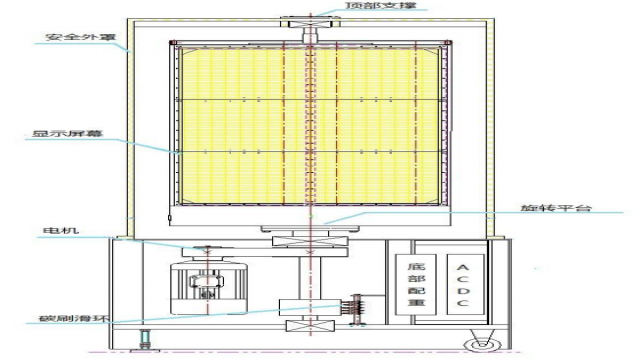
图3
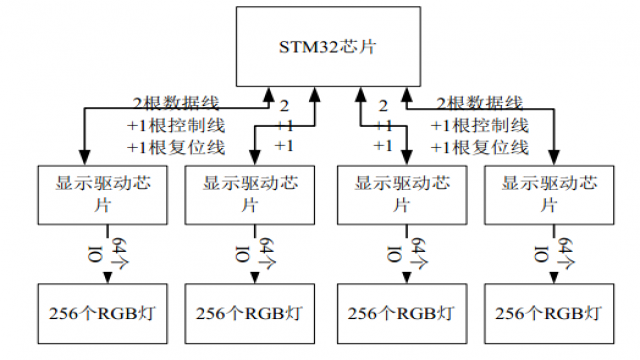
图4
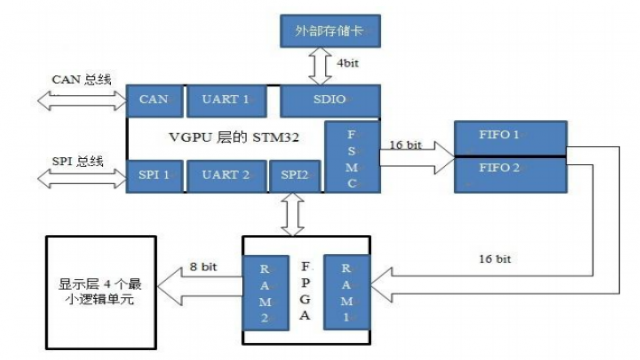
图5

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码