基于C8051F340驱动与采集的CCD光电遥测垂线仪
3 CCD驱动实现
仪器采用日本东芝公司的线阵CCD TCD1702C,其像素总数为7 500个单元,像敏单元长为7 μm、高为7 μm,中心距亦为7 μm。像敏区总长为52.5 mm。
获取线阵CCD的二维图像,必须配以驱动脉冲序列。图2为TCD1702C的驱动脉冲波形图。它的驱动脉冲由5路脉冲构成,输出为2路与光强相关的模拟信号,一路为奇数单元的信号,另一路为偶数单元的信号。
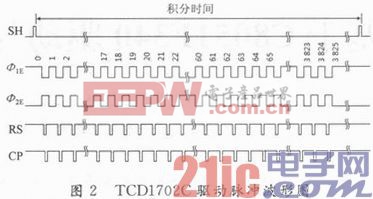
TCD1702C是没有快门控制的CCD器件,在顺序读出的过程中光敏单元仍然对光敏感,在驱动脉冲频率允许的范围内,频率越高越能反应出光敏单元真实的光照情况,反之得到的是模糊的图像。利用单片机产生脉冲序列非常容易,但以往的单片机系统频率低,产生的脉冲序列频率远达不到1 MHz,所以环境光对其影响特别大,这也是通常要使用CPLD驱动CCD的原因。
C8051F340具有精确校准的最大12 MHz内部振荡器以及可外接最大12 MHz外部晶体振荡器,4倍时钟乘法器允许使用12 MHz振荡器产生48 MHz时钟,大大提高了指令执行速度。只要所选择的振荡器被使能并稳定运行,单片机的系统时钟可以在内部振荡器、外部振荡器和4倍时钟乘法器之间自由切换。在扫描CCD过程中,启用了单片机的4倍时钟乘法器,使脉冲序列的频率达到1 MHz以上,在扫描结束后关闭4倍时钟乘法器,以降低系统功耗。为提高脉冲序列的驱动能力,在单片机I/O端口与TCD1702C之间设置了CMOS反相器。这样大大减化了电路设计,降低了仪器成本,同时达到了降低环境光影响的效果。
4 CCD输出信号采集实现及数据处理
根据线阵CCD的检测原理,被检测对象的光信息通过光学成像系统成像于CCD的光敏面上,CCD的光敏像元将其上的光强度转换成电荷量。CCD在一定频率的时钟脉冲的驱动下,在CCD的输出端可以获得被测对象的视频信号。
在CCD输出端获得的视频信号幅值较小,为了便于CCD输出信号采集,对CCD输出信号做了一定的处理。CCD采集实现原理框图如图3所示。
TCD1702C输出信号经放大、整形处理后,得到比较直观且易于检测的脉冲信号,如图4所示。整形输出端连接至C8051F340单片机的外部中断端口。当扫描至阴影的边缘时发生中断,记录下扫描脉冲数,扫描结束后通过对这些边缘的计算可得到标点和垂线的坐标。


加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码