小麦硬度检测控制器的设计
2.3 电机控制电路设计
系统通过电机精确控制丝杆上的滑动模块向下运动以提供均匀压力。根据系统的需求,选用富士FALDIC-W型号的伺服电机作为执行器。伺服电机的速度的控制使用方波信号,方波的频率控制电机的速度,在应用中使用S3C2410的GPB0引脚的TOUT0。伺服电机方向的控制需要电平信号,系统中对电机的方向的控制使用GPB1的普通I/O口,通过输出0、1数字信号完成对电机正反方向的控制。由于对电机速度和方向需要差动信号,要对控制器发过来的脉冲和电平控制信号使用四路差动线路驱动器MC3487进行转化为差动信号再送给伺服控制器,电路如图3所示。

2.4 位移检测电路设计
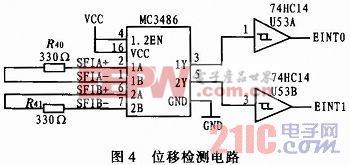
位移检测主要是根据伺服电机的编码器在伺服电机转动时反馈的脉冲数来确定探针的移动位移。其中编码器在电机转动一周时所发送的脉冲数可以通过伺服单元的设置模式进行设置,设置范围为16~32 768个/转。反馈过来的脉冲信号也是差动信号,对电机反馈过来的脉冲差动信号需要使用MC3486来转化为控制器所要的脉冲信号。这样就可以利用控制器的外部中断来检测脉冲的个数。然后利用式(1)实时的测定位移传感器探头的位移。电路如图4所示。为了提高准确的检测编码器发出的脉冲个数,这里使用了两路脉冲检测。其中,SFIA+、SFIA-、SFIB+和FIB-是编码器的两相差动信号,通过MC3486转为脉冲信号,再通过74HC14施密特触发器整形后,获得较理想的矩形脉冲,然后送到外部中断进行脉冲计数。
3 驱动软件设计
设备驱动程序是操作系统内核和机器硬件之间的接口。设备驱动程序主要完成对设备进行初始化和释放,把数据从内核传送到硬件和从硬件读取数据、读取应用程序传送给设备文件的数据。Linux为所有的设备文件都提供了统一的操作函数接口,方法是使用数据结构struct file_operations。这个数据结构中包括许多操作函数的指针,如open()、close()、read()和write()等。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码