机器视觉技术与运动控制技术相结合解析方案
关联运动坐标系统和视觉坐标系统
在消除或校正了图像系统的失真影响后,另一个您在设计系统时要防范的问题是确保相机的坐标系统和运动控制的坐标系统同轴。根据具体的应用以及您所要获得的精度,同轴性可能会成为提高性能的最关键环节。相机和运动控制坐标系统不严格同轴会导致指令的偏差。例如,如果您使用不同轴的工作台和相机,当物体在工作台上沿X方向向移动时相机会记录工作台在X方向和Y方向同时移动。使用坐标转换可以校正坐标系统的偏移。坐标转换可以把一个坐标系统(工作台坐标系统)转换为另一个坐标系统(相机的坐标系统)。例如机器人应用中经常会用到这些坐标变换技术来根据获取的信息确定最终的执行系统应该怎样工作。在下图中,黑色为相机坐标系统,绿色为工作台坐标系统,二者相差一定的角度。
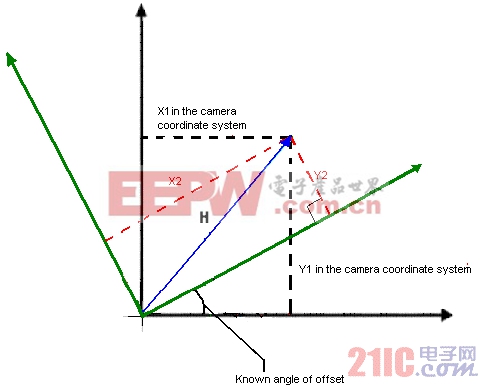
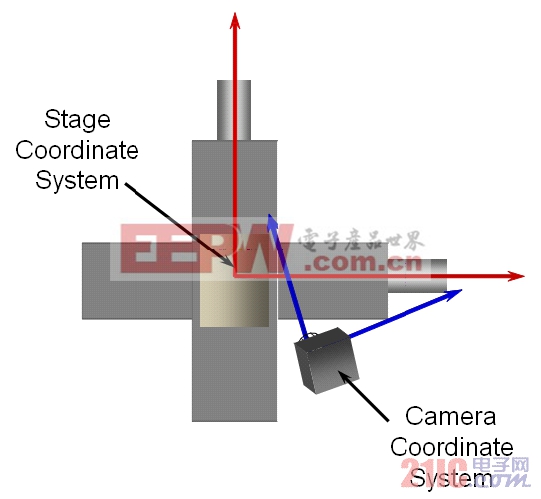
图3:坐标系统的不同轴会导致运动控制系统与视觉系统距离换算时出现偏差。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
