机器人示教盒系统的设计
4.3 键盘部分的软件设计
采用Intel 8279通用可编程的键盘显示器接口芯片,由8279控制的键盘输入部分最多为64个触点的键盘,本系统采用32个触点的键盘。先对8279进行初始化:设置8279的工作方式,数码管显示采用左端输入、双键互锁,编码扫描方式;设置分频数使内部工作频率为100khz;清除8279中FIFO RAM和显示RAM中的数据。读键盘程序中包括读出8279中的状态字,判断是否有键按下,如有,则读出键值,按键值进行散转程序。
4.4 通讯软件的设计
4.4.1 通讯协议的制定:
为确保通讯成功,通讯双方必须在软件上有一系列的约定,通常称为软件“协议”。在该系统中采用的协议如下:
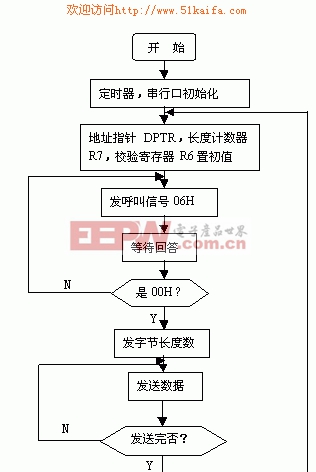
(1)开始通讯时,示教盒发送一个呼叫信号“06H”,询问主控机是否可以接收数据;
(2)主控机接收到呼叫信号后,若同意接收数据则发回“00H”作应答,否则发“15H”表示暂不能接收数据;
(3)示教盒只有收到应答信号“00H”后,才可把数据发送给主控机,否则继续向主控机呼叫,直到对方同意接收。
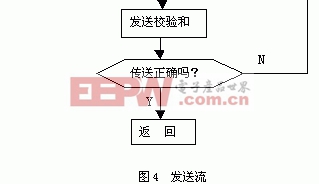
(4)主控机根据接收到的“校验和”判断已接收到的数据是否正确。若接收正确,向示教盒回发“0FH”信号,否则回发“F0H”。
(5)示教盒只有接到信号“0FH”才算完成发送任务,否则继续呼叫,重发数据。
其发送数据格式为:

其中: 字节数:示教盒向主控机发送的数据个数;
数据1~ 数据n :示教盒向主控机发送的n个数据;
累加校验和:为字节数n,数据1,……,数据n这(n+1)个字节内容的算术累加和。
4.4.2 通讯流程图
示教盒以查询方式发送数据,其流程图如图4所示。
5 结束语
示教盒已成功的在我校的机器人教学实验中得到应用,示教盒操作方便,显示准确无误,工作稳定,证明示教盒的设计合理。
参考文献
1熊有伦主编. 机器人技术基础. 武汉:华中理工大学出版社,1996
2陈光初,赵行初著. 单片微型计算机原理与接口技术. 武汉:华中理工大学出版社,1993

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
