惯性传感器促进移动机器人自主工作
比较图8和图9中的路径轨迹,很容易看出两者在保持路径精度上的差异。应注意,这些实验中采用的是早期MEMS技术,支持~0.02°/秒的稳定度。目前的陀螺仪在相同成本、尺寸和功率水平下性能可提高2到4倍。随着这一趋势的延续,在重复路径上维持精确导航的能力将继续改善,这将为开发更多市场和应用(例如医院标本/补给品递送)带来机遇。
补给品护送
目前美国国防高级研究计划局(DARPA)在提案中仍强调更多地利用机器人技术来提升军力。补给品护送便是这类应用的一个范例,此时军事护送队伍暴露于敌方威胁之下,同时不得不按可预测的模式缓慢移动。精确导航让机器人(如Seekur)可在补给品护送方面承担更多责任,减少途中人员的安全威胁。一个关键性能指标是对GPS中断情况的管理能力,此时MEMS陀螺仪驶向反馈特别有用。最新Seekur导航技术正是针对这一环境而开发的,它使用MEMS惯性测量单元(IMU)6 提高了精度,并且能在未来不断采纳地形管理和其他功能领域的新技术成果。
为了测试该系统在使用和不使用IMU时的定位性能,对室外路径误差进行了记录和分析。图10比较了仅使用测程法时相对于真实路径(源自 GPS)的误差与在卡尔曼滤波器内结合使用测程法与 IMU时的误差。后者的位置精度是前者的近15倍。
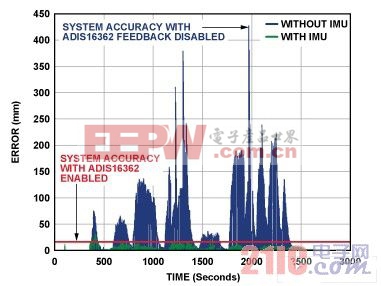
图 10. 使用测程法/IMU(绿色)与仅使用测程法(蓝色)的 Seekur 位置误差。
结论
机器人平台开发人员发现,MEMS陀螺仪技术为改善导航系统方向估算和总体精度提供了经济高效的方法。预校准的系统就绪型器件使得简单的功能集成得以实现,有利于开发工作顺利起步,并让工程师可集中精力开展系统优化。随着MEMS技术持续改善陀螺仪噪声、稳定性和精度指标,精度和控制水平将不断提高,从而可为自主机器人平台继续拓展新的市场。诸如Seekur等系统的下一代开发工作可从陀螺仪过渡到完全集成的MEMS IMU/6自由度(6DoF)传感器。虽然面向偏航的方法很有用,但世界毕竟不是平面的;目前及未来的许多其他应用均可利用MEMS IMU进行地形管理和进一步的精度改进,并通过三个陀螺仪实现完全对准反馈和校正。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
