基于MCS-51单片机的智能机器人迷宫车设计
1.2 迷宫车控制程序设计
控制算法:
迷宫车一般有四种控制算法:
(1)靠左算法
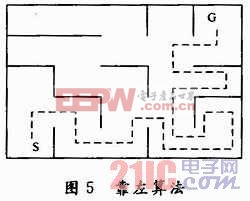
①默认靠左走法。即一直沿着左墙壁走,左边有墙时一直沿着左边墙壁前进,当左边没有墙时左转,然后继续靠左边墙壁运行。该算法使用于最简单的迷宫走法。如图5所示,其中虚线表示小车前进的路线。
②算法流程图如图6所示。
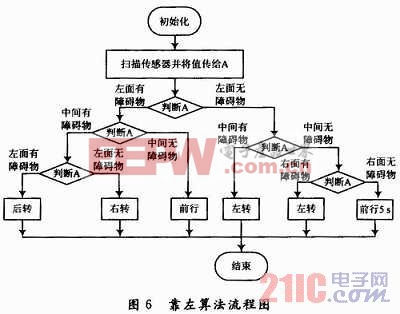
③靠左算法的弊端。按照该算法,小车在走第二遍迷宫的时候,可以一次性的走出迷宫,但是这条道路不一定是最短的道路;如果迷宫本身存在“孤岛”,那么小车很有可能走不出迷宫。如图7所示。图7中两个圆点分别表示入口和出口,小车从入口进入迷宫,靠左前进则会导致小车一直按照虚线所描绘出的路线一直在迷宫里循环,终走不出迷宫。

(2)靠前算法
①靠前算法即一直沿着前方道路前行(前方没有任何障碍时一直前进),当前边没有墙时判断左边,左边没墙左转,左边有墙则判断右边。然后重复该循环。该算法使用于最简单的迷宫走法。
②算法流程图如图8所示。
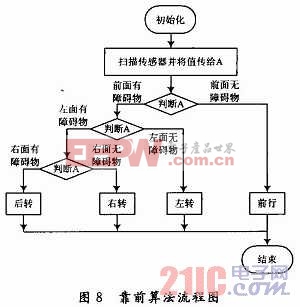
③程序思路:前边没墙靠前走,前面有墙判断左边,左边没墙靠左转,左边前边都有墙再判断右边,右边没有墙靠右转,三面都墙直接后退转180°,继续靠前走。0表示有墙,1表示没墙,p3.0表示左传感器;p3.1表示前传感器;p3.2表示右传感器。
转角控制思路:计算轮子的转速,测出小车转90°时每个轮子所行的路程,用路程来除速度,求出一个时间作为小车转弯时的延迟时间,再通过调试进一步精确转角。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码