一种基于模糊-PI双模控制器设计方法
2.3 模糊控制器设计
2.3.1 确定输入、输出隶数度函数
模糊控制器采用二维结构,以偏差e和偏差变化率ec作为模糊控制器的输入信号,将模糊控制器进行模糊化、模糊逻辑推理、解模糊化等一系列操作,最后得到模糊控制器输出控制量信号u。模糊推理输入的语言变量为E和EC,模糊论域为[-6,6],输出模糊论域变量为U,模糊论域为[0,10]。实际偏差e的变化范围是[-0.5,0.5],实际偏差变化率ec的变化范围是[-1,1],实际输出控制量u的变化范围是[0,10]。因此可确定偏差e的量化因子Ke=12,偏差变化率ec的量化因子Kec=6,控制量u的量化因子Ku=1。变量E的语言值设定为6个,即{负大(NB)、负中(NM)、负小(NS)、正小(PS)、正中(PM)、正大(PB)};将变量EC的语言值设定为5个,即{负大(NB)、负小(NS)、零(Z)、正小(PS)、正大(PB)};输出变量U的语言值设定为5个,即{负大(NB)、负小(NS)、零(Z)、正小(PS)、正大(PB)},并设定好隶属函数,如图3、图4和图5所示。
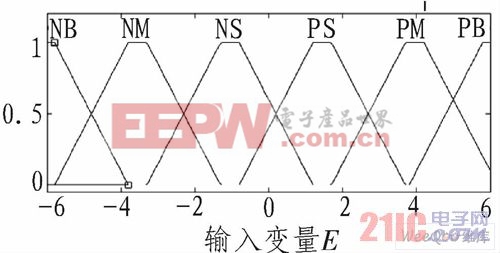
图3 E隶属度函数图
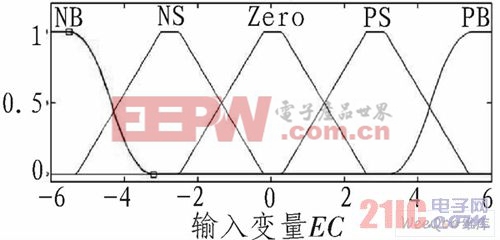
图4 EC隶属度函数图
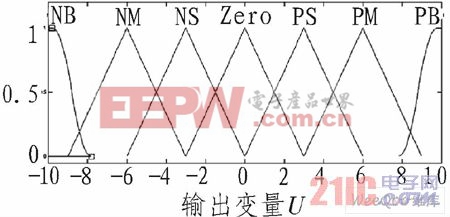
图5 U隶属度函数图
2.3.2 模糊规则设计
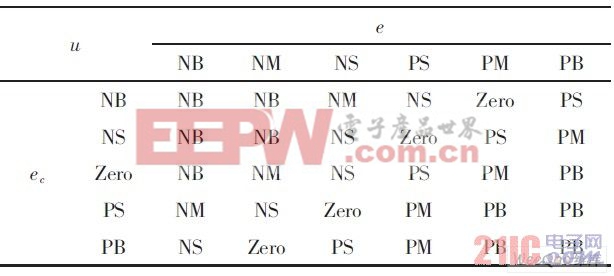
模糊-PI双模控制中的模糊控制器主要工作在过渡过程,希望模糊控制能加快系统响应速度,根据偏差和偏差变化率的不同状态、工程设计人员的技术知识和实际操作经验,建立合适的模糊规则表,得到模糊控制规则如表1所示。
表1 模糊-PI双模控制的模糊控制规则

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码