基于DSP仿人机器人关节控制器设计
2 仿人机器人控制器的软件设计
2.1 关节控制器主程序
主程序的流程见图7。
2.1 关节控制器主程序
主程序的流程见图7。
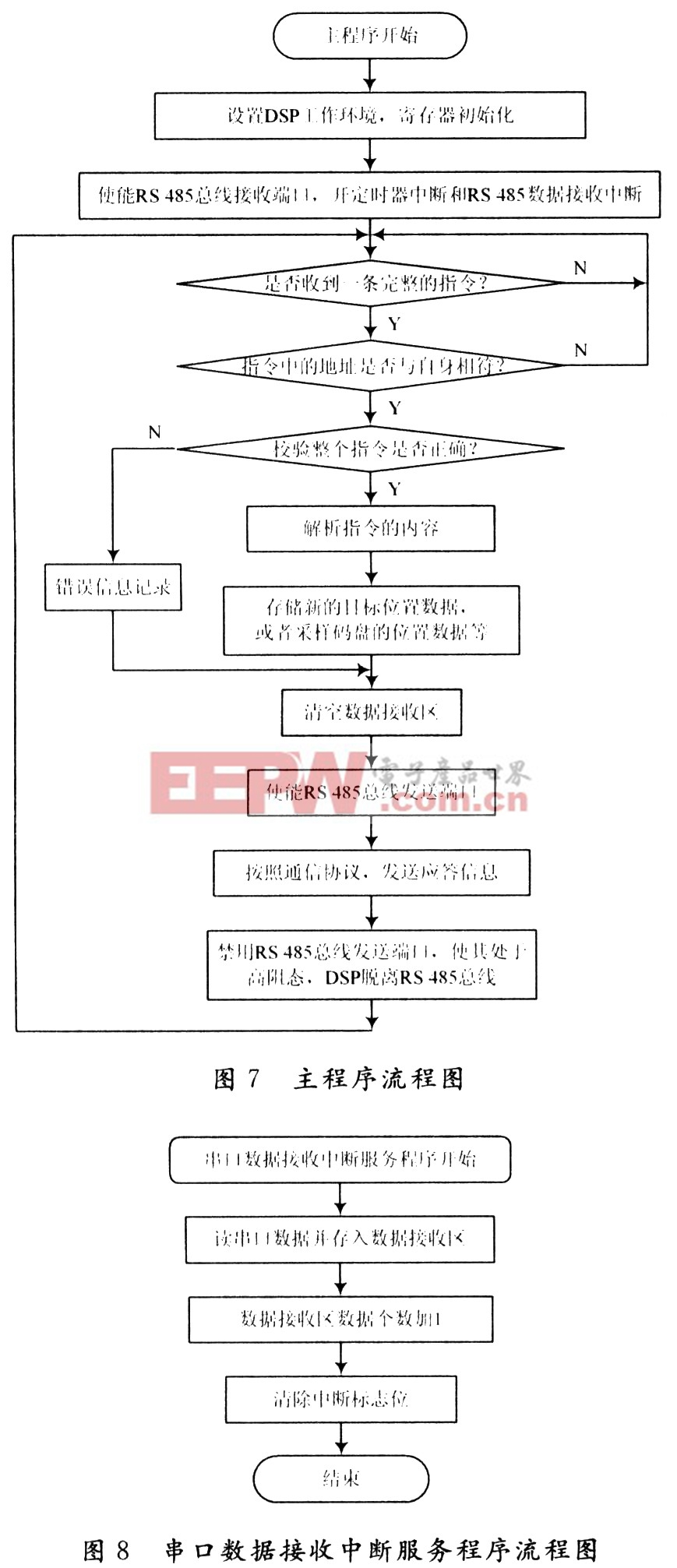
寄存器初始化操作主要包括:设置CPU CLK为外部晶振的2倍频,即16 MHz;设置串口通信波特率为:38.4 Kb/s;设置定时器/计数器相关寄存器;设置QEP电路单元相关寄存器;设置中断控制寄存器等。
2.2 串口数据接收中断服务程序
串口数据接收中断服务程序流程图见图8。在中断服务程序中,读取数据接收寄存器中的数据,存入数据接收区,而并不做任何进一步分析和处理。数据接收区是内存中暂时存放数据的区域,当存满一条完整指令信息后,由主程序分析和处理。
2.3 控制周期定时中断服务服务程序
控制周期2 ms定时中断服务程序的流程见图9。定时器/计数器为位置环和速度环控制周期定时2 ms,每2 ms进入定时中断服务程序1次,读取位置反馈值和速度反馈值,进行积分分离PID运算,最后输出给D/A转换成模拟量。
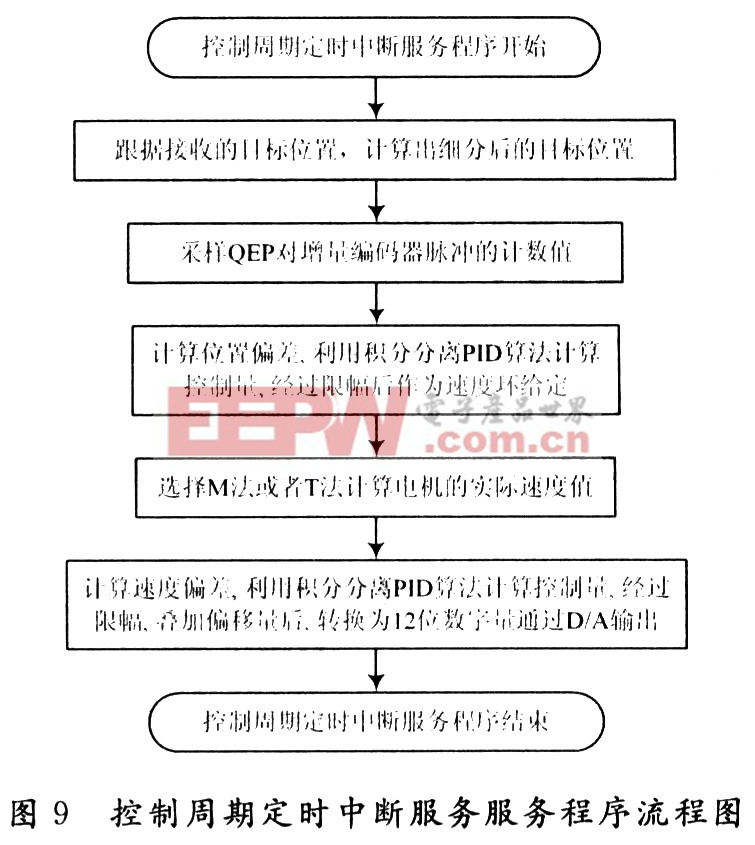
每一个插补周期(50 ms),主计算机向关节控制器发送1次运动规划后的目标位置。该目标位置是以增量编码器信号四倍频后的脉冲数为单位,以前一次的目标位置作为脉冲计数的零点。因此,关节控制器在读取新的目标位置后,也应该以前一次的目标位置作为新的增量码盘脉冲计数零点,测量实际的电机位置,与新的目标位置比较、运算。主计算机根据需要可以查询当前电机运行的实际位置,关节控制器返回的位置则是关节角的绝对位置,单位是0.1°。
3 结 语
仿人机器人机械臂分布式关节控制器研究与设计,对于提高仿人机器人总体性能与人机交互能力,具有重要科研价值与现实意义。机械臂分布式控制器的高度实时性、容错性、可靠性、扩充性,为仿人机器人系统提供了先进的网络体系结构与通信标准,实践表明应用前景极为广阔。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
