有机械耦合的电容式硅微陀螺敏感信号读取
由于φ1 的存在,x(t)和y1(t)不完全正交,频率敏感系数随陀螺加工不一致性有关。如果假设敏感信号电压正比于敏感方向位移,在敏感电压输出中混有驱动电压干扰,暂不考虑电路相移,在相关检测器之前的信号输出为
![]()
其中 A、B 为系数,B干扰系数;
φud 驱动电压与驱动方向位移的相角差。
实际上,B值比较大,即使在无机械耦合的理想条件下,有用敏感信号与电干扰也不完全正交。相关检测器参考电压的相位调整要首先保证去除电干扰。
实际的机械耦合存在下列几个方面:
1、质心G 偏离坐标原点,导致振动方向偏离驱动力方向,意味着驱动振动在敏感方向会产生一个分量。
2、支承梁和梳齿的尺寸加工误差会产生刚度耦合、刚度不对称、驱动力不对称以及位移检测不对称等误差。
3、由于气体阻尼和结构不对称产生阻尼耦合误差。
对于线振动电容式硅微陀螺,在X方向的驱动电压会引起三种模态振动:驱动模态,振型为敏感质量沿X 方向的线振动;检测模态,振型为敏感质量沿Y 方向的线振动;旋转模态,振型为敏感质量绕Z 方向的角振动。对于理想化的(无机械耦合)硅微机械陀螺,仅驱动模态被激发,如果没有外界角速度输入,陀螺输出为零。受测量科氏力和机械耦合影响所产生的敏感加速度如图2所示。质心偏移和刚度耦合和驱动位移成正比,与驱动速度信号相位正交,因此刚度耦合误差将造成陀螺的正交耦合运动。阻尼耦合误差形成的干扰力与驱动速度成正比,该力与驱动速度信号和哥式加速度信号相位同相。由于硅微陀螺的Q值较高,特别是在真空硅微陀螺中,可以忽略阻尼干扰。一个简化的耦合模型如图3所示。
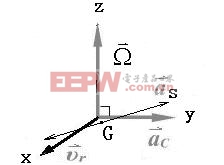
图 2 受测量科氏力和机械耦合影响所产生的敏感加速度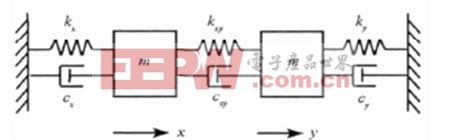
图3 机械耦合影响下的微陀螺结构模型
Fig. 3 Vibrating gyroscope model under mechanical coupling
根据这个耦合模型得到一个近似稳态解
![]()
其中 E2 为刚度耦合影响系数,与刚度耦合系数kxy ,y方向刚度ky有关;
E3 为阻尼耦合影响系数,与阻尼耦合系数Cxy ,y方向品质因数Qy有关。
如果忽略真空硅陀螺中的同相阻尼影响,必然存在刚度耦合影响为零的时刻t0,使
![]()
当φ1很小时,敏感位移峰值应出现在t0附近。在非线性较大的陀螺中,也可以利用Ω=0条件,搜索到绝对值y2最小点,作为零参考点。
图 4 刚度耦合的电学模型
Fig. 4 Electric model under mechanical rigidity coupling

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码


