双排传感器循迹策略研究
第二种直道情况(图3)
此情况是对第一种情况的再确认,左转大弯并经过第一种情况后,再经历此种情况,可确认无误前方为直道,继续提升小车的加速能力。控制程序由弯道程序切换到直线稳定程序。
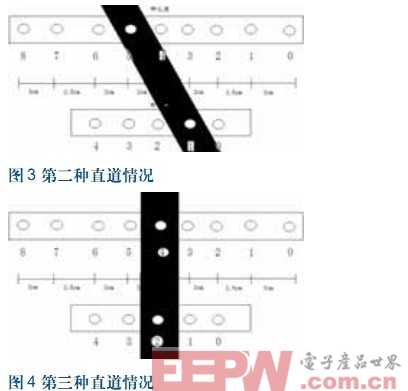
第三种直道情况 (图4)
此时采取直线稳定控制。由于前两种情况已经明确识别为直道,此种情况只是增加直道识别的成功率。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
第二种直道情况(图3)
此情况是对第一种情况的再确认,左转大弯并经过第一种情况后,再经历此种情况,可确认无误前方为直道,继续提升小车的加速能力。控制程序由弯道程序切换到直线稳定程序。
第三种直道情况 (图4)
此时采取直线稳定控制。由于前两种情况已经明确识别为直道,此种情况只是增加直道识别的成功率。
加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码

