基于小脚丫STEP MXO2的温度显示系统
1、项目简介
基于小脚丫STEP MXO2的温度显示系统的核心控制模块为小脚丫STEP MXO2开发板,采用由MicroUSB输入的5V供电,温度传感器选用的是DALLAS的经典传感器——DS18B20,一个封装和常见三极管(TO-92)相同的温度传感器,而显示模块采用LCD1602,相信读者对这两个模块一定是极为熟悉。
2、项目框图

2.1 控制核心
温度计项目控制核心为小脚丫STEP MXO2 V2版本FPGA开发板,FPGA芯片为Lattice Semiconductor的MachXO2 400HC系列FPGA。
2.2 温度采集模块
温度采集模块采用Dallas的经典产品——DS18B20,是一个高精度,占用空间小,硬件连接简单,价格低廉的数字温度传感器,采用单总线驱动方式,更为节省开发板资源。
2.3 温度显示系统
温度显示模块采用集成了ASCII字库的LCD1602,省去了自建字库的麻烦。
3、硬件电路图
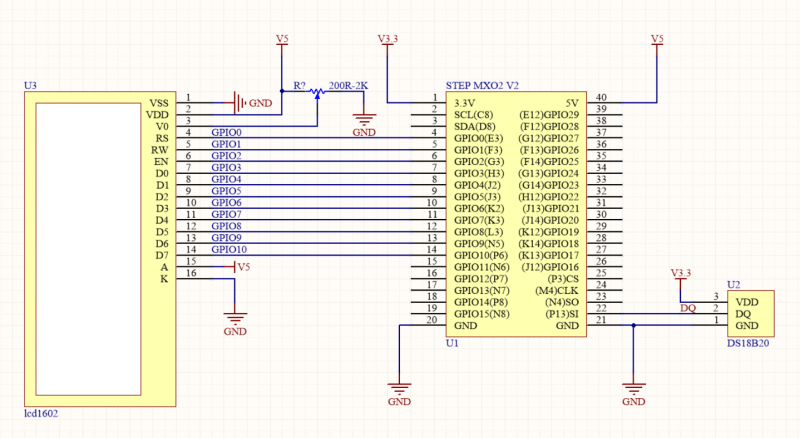
温度计的硬件电路比较简单,首先在供电方面,作为控制核心的小脚丫开发板由于具备完善的下载与供电方案,故不必在设计下载电路,只需要一根MicroUSB数据线即可满足整体系统的供电与下载;
在温度采集部分,DS18B20共有三个引脚,我们参照硬件手册,可发现该芯片的1号引脚接地,2号引脚为数据信号DQ,接到小脚丫的任意引脚上(下图接到了小脚丫STEP MXO2的“SI”引脚上),3号引脚为电源脚,参照手册,DS18B20的输入电压为3.0V-5.5V,此处我们采用了3.3V供电。
温度显示部分,LCD1602共有16个引脚,下图为LCD1602的引脚简介,对应连接即可:

4、Verilog代码
4.1 Verilog代码:LCD1602显示部分
// --------------------------------------------------------------------
// >>>>>>>>>>>>>>>>>>>>>>>>> COPYRIGHT NOTICE <<<<<<<<<<<<<<<<<<<<<<<<<
// --------------------------------------------------------------------
// Module:LCD1602 //
// Author: STEP//
// Description: Display the temperature by LCD1602
// --------------------------------------------------------------------
// Code Revision History :
// --------------------------------------------------------------------
// Version: |Mod. Date: |Changes Made:
// V1.0 |2017.3.8 |Initial ver
// --------------------------------------------------------------------
module LCD_1602(clk,LCD_EN,RS,RW,DB8,one_wire,rst);
input clk,rst; //系统时钟与复位,系统时钟==12M
output LCD_EN; //LCD_EN为LCD模块的使能信号(下降沿触发)
output RS; //RS=0时为写指令;RS=1时为写数据
output RW; //RW=0时对LCD模块执行写操作;RW=1时对LCD模块执行读操作
output [7:0] DB8; //8位指令或数据总线
inout one_wire; //例化DS18B20模块单总线
reg RS;
reg LCD_EN_Sel;
reg [7:0] DB8;
reg [127:0] data_row1;
reg [127:0] data_row2;
reg [7:0] result_unit;
reg [7:0] result_decade;
reg [7:0] result_hundred;
reg [7:0] result_dec;
reg [7:0] result_dec2;
reg [7:0] result_dec3;
reg [7:0] result_dec4;
reg [7:0] sign; reg [3:0] num_unit;
reg [3:0] num_decade;
reg [3:0] num_hundred;
reg [3:0] num_dec;
reg [3:0] num_dec2;
reg [3:0] num_dec3;
reg [3:0] num_dec4; //若想显示小数点第四位,添加至显示内容并调整即可 reg[19:0] cnt_ref; //LCD1602更新计数器
reg ref; //更新标志位
always@(posedge clk_2ms) //产生LCD1602更新所需信号
begin
if(cnt_ref==220)
begin
cnt_ref<=0;
ref<=1;
ref<=0;
end
else
begin
cnt_ref<=cnt_ref+1;
ref<=1;
end
end always@(*) //1602输入数据接口处理
begin
case(num_unit) //个位
4'd0:result_unit<=8'b00110000;
4'd1:result_unit<=8'b00110001;
4'd2:result_unit<=8'b00110010;
4'd3:result_unit<=8'b00110011;
4'd4:result_unit<=8'b00110100;
4'd5:result_unit<=8'b00110101;
4'd6:result_unit<=8'b00110110;
4'd7:result_unit<=8'b00110111;
4'd8:result_unit<=8'b00111000;
4'd9:result_unit<=8'b00111001;
default:result_unit<=result_unit;
endcase case(num_decade) //十位
4'd0:result_decade<=8'b00110000;
4'd1:result_decade<=8'b00110001;
4'd2:result_decade<=8'b00110010;
4'd3:result_decade<=8'b00110011;
4'd4:result_decade<=8'b00110100;
4'd5:result_decade<=8'b00110101;
4'd6:result_decade<=8'b00110110;
4'd7:result_decade<=8'b00110111;
4'd8:result_decade<=8'b00111000;
4'd9:result_decade<=8'b00111001;
default:result_decade<=result_decade;
endcase case(num_hundred) //百位
4'd0:result_hundred<=8'b00110000;
4'd1:result_hundred<=8'b00110001;
4'd2:result_hundred<=8'b00110010;
4'd3:result_hundred<=8'b00110011;
4'd4:result_hundred<=8'b00110100;
4'd5:result_hundred<=8'b00110101;
4'd6:result_hundred<=8'b00110110;
4'd7:result_hundred<=8'b00110111;
4'd8:result_hundred<=8'b00111000;
4'd9:result_hundred<=8'b00111001;
default:result_hundred<=result_hundred;
endcase case(num_dec) //小数位
4'd0:result_dec<=8'b00110000;
4'd1:result_dec<=8'b00110001;
4'd2:result_dec<=8'b00110010;
4'd3:result_dec<=8'b00110011;
4'd4:result_dec<=8'b00110100;
4'd5:result_dec<=8'b00110101;
4'd6:result_dec<=8'b00110110;
4'd7:result_dec<=8'b00110111;
4'd8:result_dec<=8'b00111000;
4'd9:result_dec<=8'b00111001;
default:result_dec<=result_dec;
endcase case(num_dec4) //小数位
4'd0:result_dec4<=8'b00110000;
4'd1:result_dec4<=8'b00110001;
4'd2:result_dec4<=8'b00110010;
4'd3:result_dec4<=8'b00110011;
4'd4:result_dec4<=8'b00110100;
4'd5:result_dec4<=8'b00110101;
4'd6:result_dec4<=8'b00110110;
4'd7:result_dec4<=8'b00110111;
4'd8:result_dec4<=8'b00111000;
4'd9:result_dec4<=8'b00111001;
default:result_dec4<=result_dec4;
endcase case(num_dec2) //小数位
4'd0:result_dec2<=8'b00110000;
4'd1:result_dec2<=8'b00110001;
4'd2:result_dec2<=8'b00110010;
4'd3:result_dec2<=8'b00110011;
4'd4:result_dec2<=8'b00110100;
4'd5:result_dec2<=8'b00110101;
4'd6:result_dec2<=8'b00110110;
4'd7:result_dec2<=8'b00110111;
4'd8:result_dec2<=8'b00111000;
4'd9:result_dec2<=8'b00111001;
default:result_dec2<=result_dec2;
endcase case(num_dec3) //小数位
4'd0:result_dec3<=8'b00110000;
4'd1:result_dec3<=8'b00110001;
4'd2:result_dec3<=8'b00110010;
4'd3:result_dec3<=8'b00110011;
4'd4:result_dec3<=8'b00110100;
4'd5:result_dec3<=8'b00110101;
4'd6:result_dec3<=8'b00110110;
4'd7:result_dec3<=8'b00110111;
4'd8:result_dec3<=8'b00111000;
4'd9:result_dec3<=8'b00111001;
default:result_dec3<=result_dec3;
endcase
end //-------------------------------------//
//输入时钟12MHz 输出周期2ms//division12MHz_2ms.v
reg [15:0]count;
reg clk_2ms;
always @ (posedge clk)
begin
if(count == 16'd12_000)
begin
count <= 16'b1;
clk_2ms <= ~clk_2ms;
end
else
count <= count + 1'b1;
end//---------------------------------------//
reg [127:0] Data_Buf; //液晶显示的数据缓存
reg [4:0] disp_count;
reg [3:0] state; //状态机
parameter Clear_Lcd = 4'b0000; //清屏并光标复位
parameter Set_Disp_Mode = 4'b0001; //设置显示模式:8位2行5x7点阵
parameter Disp_On = 4'b0010; //显示器开、光标不显示、光标不允许闪烁
parameter Shift_Down = 4'b0011; //文字不动,光标自动右移
parameter Write_Addr = 4'b0100; //写入显示起始地址
parameter Write_Data_First = 4'b0101; //写入第一行显示的数据
parameter Write_Data_Second = 4'b0110; //写入第二行显示的数据
assign RW = 1'b0;
//RW=0时对LCD模块执行写操作(一直保持写状态)
assign LCD_EN = LCD_EN_Sel ? clk_2ms : 1'b0; //通过LCD_EN_Sel信号来控制LCD_EN的开启与关闭
//--------------------------------显示模块----------------------------//
always @(posedge clk_2ms or negedge rst or negedge ref)
begin
//-----------------------复位并更新显示数据--------------------// if(!rst || !ref)
begin
state <= Clear_Lcd; //复位:清屏并光标复位
RS <= 1'b1; //复位:RS=1时为读指令;
DB8 <= 8'b0; //复位:使DB8总线输出全0
LCD_EN_Sel <= 1'b0; //复位:关夜晶使能信号
disp_count <= 5'b0;
data_row1 <= { //输入第一行要显示的数据
8'b01010011, //S
8'b01010100, //T
8'b01000101, //E
8'b01010000, //P
8'b00100000, //SPACE
8'b01000110, //F
8'b01010000, //P
8'b01000111, //G
8'b01000001, //A
8'b00100000, //SPACE
8'b00100000, //SPACE
8'b00100000, //SPACE
8'b00100000, //SPACE
8'b00100000, //SPACE
8'b00100000, //SPACE
8'b00100000 //SPACE
};
data_row2 <= { 8'b00100000, //输入第二行要显示的数据
8'b00100000, //SPACE
8'b01010100, //T
8'b01100101, //e
8'b01101101, //m
8'b00111010, //冒号
sign,
result_unit,
result_decade,
result_hundred,
8'b00101110, //.
result_dec,
result_dec2,
result_dec3,
8'hdf, //℃
8'b01000011 };
end
else
begin
case(state) //-------------------------------初始化LCD------------------------------------//
Clear_Lcd : begin LCD_EN_Sel <= 1'b1; //开使能
RS <= 1'b0; //写指令
DB8 <= 8'b00000001; //清屏并光标复位
state <= Set_Disp_Mode; end
Set_Disp_Mode : begin DB8 <= 8'b00111000; //设置显示模式:8位2行5x8点阵
state <= Disp_On;
end
Disp_On : begin DB8 <= 8'b00001100; //显示器开、光标不显示、光标不允许闪烁
state <= Shift_Down; end
Shift_Down : begin DB8 <= 8'b00000110; //文字不动,光标自动右移
state <= Write_Addr;
end
//----------------------显示循环-----------//
Write_Addr : begin RS <= 1'b0; //写指令
DB8 <= 8'b10000000;
//写入第一行显示起始地址:第一行第1个位置
Data_Buf <= data_row1;
//将第一行显示的数据赋给Data_First_Buf
state <= Write_Data_First;
end
Write_Data_First : begin
//写第一行数据
if(disp_count == 16)
//disp_count等于15时表示第一行数据已写完
begin
RS <= 1'b0; //写指令
DB8 <= 8'b11000000;
//送入写第二行的指令,第2行第1个位置
disp_count <= 5'b0; //计数清0
Data_Buf <= data_row2;
//将第2行显示的数据赋给Data_First_Buf
state <= Write_Data_Second;
end
//写完第一行进入写第二行状态
else //没写够16字节
begin
RS <= 1'b1; //RS=1表示写数据
DB8 <= Data_Buf[127:120];
Data_Buf <= (Data_Buf << 8);
disp_count <= disp_count + 1'b1;
state <= Write_Data_First; end end
Write_Data_Second : begin
//写第二行数据
if(disp_count == 16)//数据发送完毕
begin
RS <= 1'b0; //写指令
DB8 <= 8'b10000000;
//写入第一行显示起始地址:第一行第1个位置
disp_count <= 5'b0;
state <= Write_Addr;
//重新循环
end
else
begin
RS <= 1'b1;
DB8 <= Data_Buf[127:120];
Data_Buf <= (Data_Buf << 8);
disp_count <= disp_count + 1'b1;
state <= Write_Data_Second;
end
end//---------------------------------//
default : state <= Clear_Lcd; //若state为其他值,则将state置为Clear_Lcd
endcase
end
end //--------------------------------------------------------------------------//
wire clk_in;wire rst_n_in;wire [15:0] data_out;
wire tem_flag=data_out[15:11]?1'b0:1'b1;
wire [10:0] tem_code=tem_flag?data_out[10:0]:(~data_out[10:0])+1'b1;
wire [20:0] tem_data=tem_code*625;reg [27:0] bcd_code;
DS18B20Z DS18B20Z_uut(
.one_wire(one_wire),
.clk_in(clk),
.rst_n_in(rst),
.data_out(data_out)
);
reg [48:0] shift_reg;
always@(posedge clk or negedge rst)begin
shift_reg= {28'h0,tem_data};
if(!rst) bcd_code = 0;
else
begin
repeat(21)//repeat B_SIZE times
begin
if (shift_reg[24:21] >= 5) shift_reg[24:21] = shift_reg[24:21] + 2'b11;
if (shift_reg[28:25] >= 5) shift_reg[28:25] = shift_reg[28:25] + 2'b11;
if (shift_reg[32:29] >= 5) shift_reg[32:29] = shift_reg[32:29] + 2'b11;
if (shift_reg[36:33] >= 5) shift_reg[36:33] = shift_reg[36:33] + 2'b11;
if (shift_reg[40:37] >= 5) shift_reg[40:37] = shift_reg[40:37] + 2'b11;
if (shift_reg[44:41] >= 5) shift_reg[44:41] = shift_reg[44:41] + 2'b11;
if (shift_reg[48:45] >= 5) shift_reg[48:45] = shift_reg[48:45] + 2'b11;
if (tem_flag==0) sign<=8'b00101101;
if (tem_flag==1) sign<=8'b00100000;
shift_reg = shift_reg << 1;
end
bcd_code=shift_reg[48:21];
num_unit <= bcd_code[27:24];
num_decade <= bcd_code[23:20];
num_hundred<= bcd_code[19:16];
num_dec <= bcd_code[15:12];
num_dec2 <= bcd_code[11:8];
num_dec3 <= bcd_code[7:4];
num_dec4 <= bcd_code[3:0];
end
end
endmodule4.2 温度采集部分
// --------------------------------------------------------------------// >>>>>>>>>>>>>>>>>>>>>>>>> COPYRIGHT NOTICE <<<<<<<<<<<<<<<<<<<<<<<<<// --------------------------------------------------------------------// Module:DS18B20Z // // Author: Step// // Description: Drive DS18B20Z to get temperature code// // Web: www.stepfpga.com// // --------------------------------------------------------------------// Code Revision History :// --------------------------------------------------------------------// Version: |Mod. Date: |Changes Made:// V1.0 |2015/11/11 |Initial ver// --------------------------------------------------------------------module DS18B20Z( input clk_in, // system clock input rst_n_in, // system reset, active low inout one_wire, // ds18b20z one-wire-bus output reg [15:0] data_out // ds18b20z data_out ); localparam IDLE = 3'd0; localparam MAIN = 3'd1; localparam INIT = 3'd2; localparam WRITE = 3'd3; localparam READ = 3'd4; localparam DELAY = 3'd5; //generate clk_1mhz clock reg clk_1mhz; reg [2:0] cnt_1mhz; always@(posedge clk_in or negedge rst_n_in) begin if(!rst_n_in) begin cnt_1mhz <= 3'd0; clk_1mhz <= 1'b0; end else if(cnt_1mhz >= 3'd5) begin cnt_1mhz <= 3'd0; clk_1mhz <= ~clk_1mhz; end else begin cnt_1mhz <= cnt_1mhz + 1'b1; end end reg one_wire_buffer; reg [3:0] cnt_main; reg [7:0] data_wr; reg [7:0] data_wr_buffer; reg [2:0] cnt_init; reg [19:0] cnt_delay; reg [19:0] num_delay; reg [5:0] cnt_write; reg [5:0] cnt_read; reg [15:0] temperature; reg [7:0] temperature_buffer; reg [2:0] state = IDLE; reg [2:0] state_back = IDLE; always@(posedge clk_1mhz or negedge rst_n_in) begin if(!rst_n_in) begin state <= IDLE; state_back <= IDLE; cnt_main <= 4'd0; cnt_init <= 3'd0; cnt_write <= 6'd0; cnt_read <= 6'd0; cnt_delay <= 20'd0; one_wire_buffer <= 1'bz; temperature <= 16'h0; end else begin case(state) IDLE:begin state <= MAIN; state_back <= MAIN; cnt_main <= 4'd0; cnt_init <= 3'd0; cnt_write <= 6'd0; cnt_read <= 6'd0; cnt_delay <= 20'd0; one_wire_buffer <= 1'bz; end MAIN:begin if(cnt_main >= 4'd11) cnt_main <= 1'b0; else cnt_main <= cnt_main + 1'b1; case(cnt_main) 4'd0: begin state <= INIT; end 4'd1: begin data_wr <= 8'hcc;state <= WRITE; end 4'd2: begin data_wr <= 8'h44;state <= WRITE; end 4'd3: begin num_delay <= 20'd750000;state <= DELAY; state_back <= MAIN; end 4'd4: begin state <= INIT; end 4'd5: begin data_wr <= 8'hcc;state <= WRITE; end 4'd6: begin data_wr <= 8'hbe;state <= WRITE; end 4'd7: begin state <= READ; end 4'd8: begin temperature[7:0] <= temperature_buffer; end 4'd9: begin state <= READ; end 4'd10: begin temperature[15:8] <= temperature_buffer; end 4'd11: begin state <= IDLE;data_out <= temperature; end default: state <= IDLE; endcase end INIT:begin if(cnt_init >= 3'd6) cnt_init <= 1'b0; else cnt_init <= cnt_init + 1'b1; case(cnt_init) 3'd0: begin one_wire_buffer <= 1'b0; end 3'd1: begin num_delay <= 20'd500;state <= DELAY; state_back <= INIT; end 3'd2: begin one_wire_buffer <= 1'bz; end 3'd3: begin num_delay <= 20'd100;state <= DELAY; state_back <= INIT; end 3'd4: begin if(one_wire) state <= IDLE; else state <= INIT; end 3'd5: begin num_delay <= 20'd400;state <= DELAY; state_back <= INIT; end 3'd6: begin state <= MAIN; end default: state <= IDLE; endcase end WRITE:begin if(cnt_write >= 6'd50) cnt_write <= 1'b0; else cnt_write <= cnt_write + 1'b1; case(cnt_write) //lock data_wr 6'd0: begin data_wr_buffer <= data_wr; end //write bit 0 6'd1: begin one_wire_buffer <= 1'b0; end 6'd2: begin num_delay <= 20'd2; state <= DELAY; state_back <= WRITE; end 6'd3: begin one_wire_buffer <= data_wr_buffer[0]; end 6'd4: begin num_delay <= 20'd80; state <= DELAY; state_back <= WRITE; end 6'd5: begin one_wire_buffer <= 1'bz; end 6'd6: begin num_delay <= 20'd2; state <= DELAY; state_back <= WRITE; end //write bit 1 6'd7: begin one_wire_buffer <= 1'b0; end 6'd8: begin num_delay <= 20'd2;state <= DELAY; state_back <= WRITE; end 6'd9: begin one_wire_buffer <= data_wr_buffer[1]; end 6'd10: begin num_delay <= 20'd80;state <= DELAY; state_back <= WRITE; end 6'd11: begin one_wire_buffer <= 1'bz; end 6'd12: begin num_delay <= 20'd2;state <= DELAY; state_back <= WRITE; end //write bit 2 6'd13: begin one_wire_buffer <= 1'b0; end 6'd14: begin num_delay <= 20'd2;state <= DELAY; state_back <= WRITE; end 6'd15: begin one_wire_buffer <= data_wr_buffer[2]; end 6'd16: begin num_delay <= 20'd80;state <= DELAY; state_back <= WRITE; end 6'd17: begin one_wire_buffer <= 1'bz; end 6'd18: begin num_delay <= 20'd2;state <= DELAY; state_back <= WRITE; end //write bit 3 6'd19: begin one_wire_buffer <= 1'b0; end 6'd20: begin num_delay <= 20'd2;state <= DELAY; state_back <= WRITE; end 6'd21: begin one_wire_buffer <= data_wr_buffer[3]; end 6'd22: begin num_delay <= 20'd80;state <= DELAY; state_back <= WRITE; end 6'd23: begin one_wire_buffer <= 1'bz; end 6'd24: begin num_delay <= 20'd2;state <= DELAY; state_back <= WRITE; end //write bit 4 6'd25: begin one_wire_buffer <= 1'b0; end 6'd26: begin num_delay <= 20'd2;state <= DELAY; state_back <= WRITE; end 6'd27: begin one_wire_buffer <= data_wr_buffer[4]; end 6'd28: begin num_delay <= 20'd80;state <= DELAY; state_back <= WRITE; end 6'd29: begin one_wire_buffer <= 1'bz; end 6'd30: begin num_delay <= 20'd2;state <= DELAY; state_back <= WRITE; end //write bit 5 6'd31: begin one_wire_buffer <= 1'b0; end 6'd32: begin num_delay <= 20'd2;state <= DELAY; state_back <= WRITE; end 6'd33: begin one_wire_buffer <= data_wr_buffer[5]; end 6'd34: begin num_delay <= 20'd80;state <= DELAY; state_back <= WRITE; end 6'd35: begin one_wire_buffer <= 1'bz; end 6'd36: begin num_delay <= 20'd2;state <= DELAY; state_back <= WRITE; end //write bit 6 6'd37: begin one_wire_buffer <= 1'b0; end 6'd38: begin num_delay <= 20'd2;state <= DELAY; state_back <= WRITE; end 6'd39: begin one_wire_buffer <= data_wr_buffer[6]; end 6'd40: begin num_delay <= 20'd80;state <= DELAY; state_back <= WRITE; end 6'd41: begin one_wire_buffer <= 1'bz; end 6'd42: begin num_delay <= 20'd2;state <= DELAY; state_back <= WRITE; end //write bit 7 6'd43: begin one_wire_buffer <= 1'b0; end 6'd44: begin num_delay <= 20'd2;state <= DELAY; state_back <= WRITE; end 6'd45: begin one_wire_buffer <= data_wr_buffer[7]; end 6'd46: begin num_delay <= 20'd80;state <= DELAY; state_back <= WRITE; end 6'd47: begin one_wire_buffer <= 1'bz; end 6'd48: begin num_delay <= 20'd2;state <= DELAY; state_back <= WRITE; end //back to main 6'd49: begin num_delay <= 20'd80;state <= DELAY; state_back <= WRITE; end 6'd50: begin state <= MAIN; end default: state <= IDLE; endcase end READ:begin if(cnt_read >= 6'd48) cnt_read <= 1'b0; else cnt_read <= cnt_read + 1'b1; case(cnt_read) //read bit 0 6'd0: begin one_wire_buffer <= 1'b0; end 6'd1: begin num_delay <= 20'd2;state <= DELAY; state_back <= READ; end 6'd2: begin one_wire_buffer <= 1'bz; end 6'd3: begin num_delay <= 20'd10;state <= DELAY; state_back <= READ; end 6'd4: begin temperature_buffer[0] <= one_wire; end 6'd5: begin num_delay <= 20'd55;state <= DELAY; state_back <= READ; end //read bit 1 6'd6: begin one_wire_buffer <= 1'b0; end 6'd7: begin num_delay <= 20'd2;state <= DELAY; state_back <= READ; end 6'd8: begin one_wire_buffer <= 1'bz; end 6'd9: begin num_delay <= 20'd10;state <= DELAY; state_back <= READ; end 6'd10: begin temperature_buffer[1] <= one_wire; end 6'd11: begin num_delay <= 20'd55;state <= DELAY; state_back <= READ; end //read bit 2 6'd12: begin one_wire_buffer <= 1'b0; end 6'd13: begin num_delay <= 20'd2;state <= DELAY; state_back <= READ; end 6'd14: begin one_wire_buffer <= 1'bz; end 6'd15: begin num_delay <= 20'd10;state <= DELAY; state_back <= READ; end 6'd16: begin temperature_buffer[2] <= one_wire; end 6'd17: begin num_delay <= 20'd55;state <= DELAY; state_back <= READ; end //read bit 3 6'd18: begin one_wire_buffer <= 1'b0; end 6'd19: begin num_delay <= 20'd2;state <= DELAY; state_back <= READ; end 6'd20: begin one_wire_buffer <= 1'bz; end 6'd21: begin num_delay <= 20'd10;state <= DELAY; state_back <= READ; end 6'd22: begin temperature_buffer[3] <= one_wire; end 6'd23: begin num_delay <= 20'd55;state <= DELAY; state_back <= READ; end //read bit 4 6'd24: begin one_wire_buffer <= 1'b0; end 6'd25: begin num_delay <= 20'd2;state <= DELAY; state_back <= READ; end 6'd26: begin one_wire_buffer <= 1'bz; end 6'd27: begin num_delay <= 20'd10;state <= DELAY; state_back <= READ; end 6'd28: begin temperature_buffer[4] <= one_wire; end 6'd29: begin num_delay <= 20'd55;state <= DELAY; state_back <= READ; end //read bit 5 6'd30: begin one_wire_buffer <= 1'b0; end 6'd31: begin num_delay <= 20'd2;state <= DELAY; state_back <= READ; end 6'd32: begin one_wire_buffer <= 1'bz; end 6'd33: begin num_delay <= 20'd10;state <= DELAY; state_back <= READ; end 6'd34: begin temperature_buffer[5] <= one_wire; end 6'd35: begin num_delay <= 20'd55;state <= DELAY; state_back <= READ; end //read bit 6 6'd36: begin one_wire_buffer <= 1'b0; end 6'd37: begin num_delay <= 20'd2;state <= DELAY; state_back <= READ; end 6'd38: begin one_wire_buffer <= 1'bz; end 6'd39: begin num_delay <= 20'd10;state <= DELAY; state_back <= READ; end 6'd40: begin temperature_buffer[6] <= one_wire; end 6'd41: begin num_delay <= 20'd55;state <= DELAY; state_back <= READ; end //read bit 7 6'd42: begin one_wire_buffer <= 1'b0; end 6'd43: begin num_delay <= 20'd2;state <= DELAY; state_back <= READ; end 6'd44: begin one_wire_buffer <= 1'bz; end 6'd45: begin num_delay <= 20'd10;state <= DELAY; state_back <= READ; end 6'd46: begin temperature_buffer[7] <= one_wire; end 6'd47: begin num_delay <= 20'd55;state <= DELAY; state_back <= READ; end //back to main 6'd48: begin state <= MAIN; end default: state <= IDLE; endcase end DELAY:begin if(cnt_delay >= num_delay) begin cnt_delay <= 1'b0; state <= state_back; end else cnt_delay <= cnt_delay + 1'b1; end endcase end end assign one_wire = one_wire_buffer; endmodule

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码