具有实时跟踪功能的忆阻视觉传感器架构
因此,当Vmax试图快速触达VS过程中,Vmin也在做同样的事情,只不过速度较慢。这里,灰色区域快速变大。在若干个帧后,两个阈压限制VS,吸收全部信号变化,这样不会再产生任何热像素。从此,灰色区域恢复窄状和最大像素敏感度。
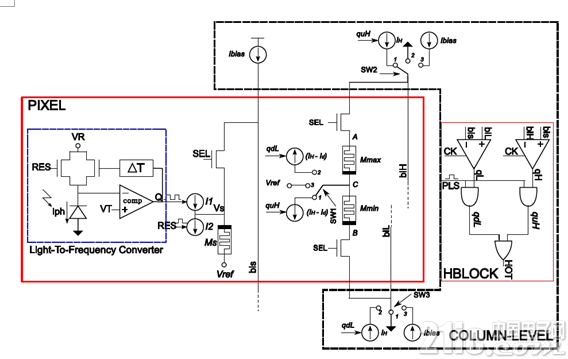
图6:利用内部三个忆阻器执行动态背景提取的像素示意图
IV. 像素实现
可以用两个理想的低通滤波器来实现等式(10)-(13)。如图5所示,LPF1实现等式(10)和(11),LPF2实现等式(12)和(13)。假设理想二极管D1-D4(无电压降),且RL> RH, 每个模块实现两个不同的一阶阻容滤波器,TH = RHC,且TL = RLC, 其中RH>> RL。监视场景中的事件需要从几秒到几十秒的大范围时间常数滤波器,这意味R和C应该分别是兆欧和微法量级的电阻器和电容器。每个模块(LPF1, LPF2)都必须能够从一个时间常数切换到另一个时间常数,从而取得自适应算法所需的行为特性。为取得一个高效的视觉传感器架构,这种双边峰值检测和滤波操作必须在像素附近的位置完成。为此,有些人提出定制CMOS传感器解决方案[17],[7],[18],使用开关电容器技术模拟每个像素里面的两个滤波器。不过,这种设计方法有以下两个缺点:(a)两个阈压值在模拟存储器内的保留时间达不到应用的求;(b)充当模拟存储单元的电容器占用的芯片面积过大,影响像素间距变小。为解决这些主要问题,我们探讨能否用一个忆阻器代替滤波器的部分功能,发挥其非易失性存储和纳米级尺度的优势。此外,通过数字脉冲(电压或电流)信号很容易控制忆阻器的电阻,按照图4的工作原理,我们的像素解决方案依靠三个忆阻器(MS, Mmax,Mmin)保存与信号VS成正比的电阻值和两个阈压Vmax和Vmin。像素解决方案的原理示意图如图6所示。光频转换器 (L2F)模块将留在像素上的光强转换成固定脉宽(△T)且频率与光生电流(Iph)成正比的数字脉冲,在像素复位过程中,MS电阻值置于最高值(MSL = ROFF ),等待L2F数字脉冲设置电阻值。
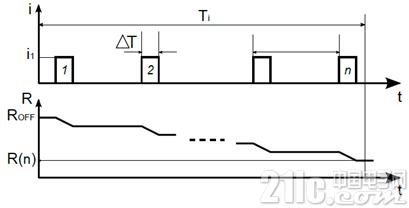
图7:像素在积分时间(Ti)内的时序图,L2F将n个数字电流脉冲I1馈入MS,使忆阻器电阻在Roff至R(n)范围内变化
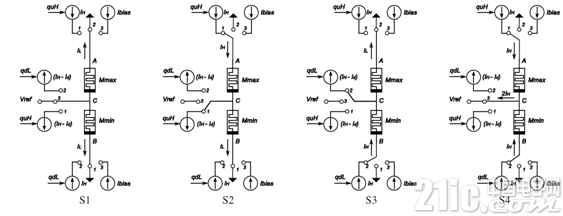
图8:与像素的四个不同状态有关(max,min)的忆阻器控制: LL,HL,LH,HH
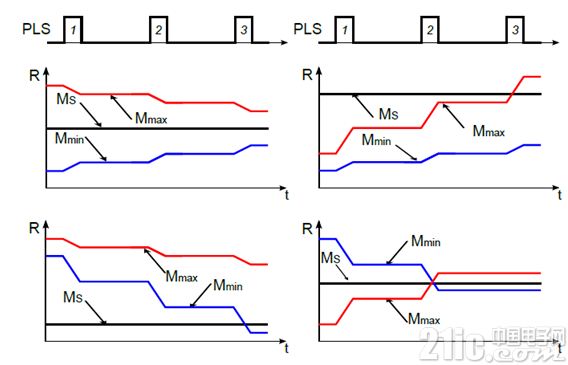
图9:在每个更新脉冲 (PLS)后,通过忆阻器电阻值(Mmax, Mmin)表达两个阈压在每个像素状态(表I所列像素状态: S1, S2, S3, S4)的预计行为。S1、S2和S3是发生在传感器工作期间的典型状态,而S4则发生在传感器校准阶段,是专门生成的信号。
A. 曝光时间
在曝光时间(Ti)内, L2F转换器生成一串振幅I1、脉宽△T且频率与光强成正比的电流脉冲,送入MS,如图7所示。下面的等式通过状态变量w(t)描述了MS的状态:

其中,RON是低电阻,D是忆阻器长度,uv是掺杂迁移率,n是L2F在曝光时间内生成的脉冲数量,在施加n个脉冲后,最终电阻值是:

B. 读出和热像素侦测
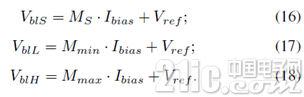
在曝光时间后,比较MS与Mmax和Mmin值,因此,像素连接位线(SEL=H),向三个忆阻施加相同的偏置电流Ibias,使忆阻器电压施加到三个位线上(blS,blH, blL)。然后将blS与blH和blL电压分别比较,以检测潜在热像素条件。将SW1、SW2和SW3都设到位置”3”,因此,使共节点C短接Vref,向Mmax和Mmin施加偏置电流Ibias。最后,取得下面的电压降:
使用置于像素外部的两个时钟驱动的列级(HBLOCK)比较器完成热像素检测。表I列出了不同像素状态的数字输出信号。
C. 阈压更新
图8描述了两个忆阻器(Mmax和Mmin)的控制与S1、S2、S3和S4四个像素状态的关系。为实现一个时间常数TH短的滤波器,用信号PLS生成的△TP脉宽的电流脉冲IPH驱动忆阻,馈入HBLOCK。通过估算注入到器件的电荷qHOT = IH△TP和施加的脉冲数量”m”,设置滤波器的时间常数。另一方面,考虑到冷像素条件,慢滤波器负责处理电荷qCOLD = IPL△TP,qCOLD qHOT。这意味,给忆阻器提供的电荷量相同时,在qCOLD情况下,忆阻变化不大。通过选用图8所示的电路配置,有时可以进行两个阈压的更新过程。假设像素状态是S3,向Mmax馈入qHOT = IH△TP , 同时向Mmin馈入qCOLD= (IH-Id) △TP, Id = IH-IL。在这种情况下,两个阈压(Vmax和Vmin)都接近电流信号VS,但是以不同的速度接近(Vmax上升快,Vmin下降慢)。
V. 仿真结果
我们使用MATLAB建立了自适应背景提取算法模型并进行了仿真测试[7],[18]。如图6所示,我们模拟了像素架构的四种不同状态,使用Cadence Spectre [19]通过电仿真再现了图9所描述的预期行为。像素架构设计采用3.3V、0:35m CMOS制造工艺,按照[9]和[20]所列等式,使用Verilog-A模拟忆阻器行为,选择宽忆阻范围(RON = 200Ω,ROFF = 200KΩ),以覆盖更大的动态范围。曝光时间值不宜过大,以不会在高频光阻编码过程中导致Ms进入导通状态为准。
使用相同的仿真参数验证四个像素状态,仿真结果见图10。用L2F在10 ms曝光时间(Ti)内生成的数字脉冲设置Ms。在忆阻重置到ROFF状态前,比较Ms的最终值与Mmax和 Mmin值。然后,根据像素条件,对Mmax和Mmin进行相应的调整。图10a是图8的像素状态S1的仿真结果。这里,像素工作正常,如曲线所示,Mmax和Mmin保持向Ms缓慢汇合的趋势。我们还注意到,热像素的二进制信号始终是低电平状态。
在像素的其它状态: 图8中的S2, S3,S4,仿真结果发现一个热像素,我们观察到两种情况。一种是,热状态像素直接随正常像素条件变化,另一种情况是热状态像素(典型S4)将必须变成另一个热像素条件(S2 或S3),才能返回到正常条件(S1)。
A. 直接从热像素状态转到冷像素状态
像素状态S2和S3通常直接转到正常像素条件。从图10b不难看出,在S2状态中,Mmax和Mmin尝试以不同的时间常量接近Ms,在这个过程中,Mmax升高速度比快Mmin很多,直到像素恢复到正常工作条件为止。如图10c所示,当像素在S3状态时出现反转,Mmin以比Mmax更快速度的下降接近Ms。图10d是S4状态的仿真结果。在这种情况下,Mmax上升速率与Mmin下降速率相同,直到像素恢复到正常条件为止。在所有情况下,变化速率是由所施加的电流脉冲振幅控制的。
B. 从一个热像素状态转到另一个热像素状态,然后转至冷像素
虽然S4是一个典型的禁用状态,是根据Mmax和Mmin两个阈值发生的热像素,但是通常发生在校准阶段系统上电过程中。在这种情况,传感器是照片拍摄模式,算法尝试将两个阈值快速汇合到冷像素条件,同时像素故意设置为状态S4。这个阶段可需要几个帧,直到整个像素达到冷状态为止。在S4状态,热像素不视为潜在报警。在图10e中,上边界Mmax在下边界Mmin之前稳定,导致S4转至S2,再转至S1。图10f是这种情况的结果:Mmin在Mmax之前稳定; 我们观察到,从S4进入S3,再进入S1。
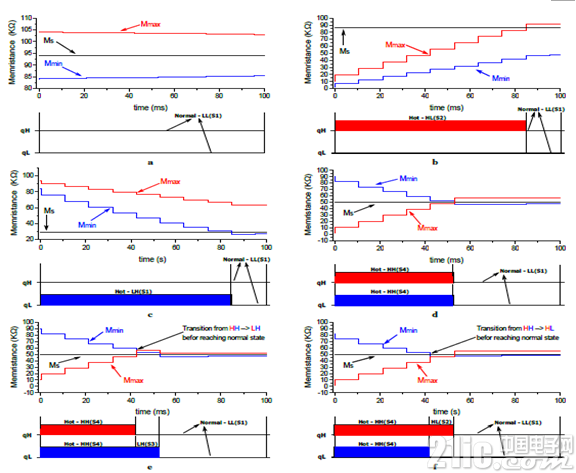
图10:内置三个忆阻器执行动态背景提取的像素架构在图6所示LL, HL, LH, HH条件下的电仿真结果。图a, b, c, d分别是四个不同控制状态S1, S2, S3、S4的仿真,从热直接变冷。图e, f是控制状态S4仿真,从热间接变冷,还描述了每个像素状态的热像素(HOT)二进制信号。红色条状图表示与上阈压V max有关的异常事件(热像素检测),上阈压V max由Mmax决定;而蓝色条状图代表下阈压V min有关的异常事件,下阈压V min由Mmin决定,详见图4给出的算法工作原理。
VI. 结论
本文论述了如何有效地结合CMOS电子元器件使用忆阻器,实现一个高效分布式处理兼备存储功能的视觉传感器架构,执行稳健的实时图像处理。本文主要论述了被称作目标跟踪引擎的自适应背景提取技术。忆阻器具有纳米级尺度和非易失性,有望成为全新的嵌入式分布处理和存储功能兼备的并行计算机的理想元器件。当芯片内部滤波器需要长时间常数或片上存储器需要更长的数据保存时间时,忆阻器的特性将具有更重要的意义。
参考文献
[1] J. Choi, S. Park, J. Cho, and E. Yoon, “A 3.4 w cmos image sensor withembedded feature-extraction algorithm for motion-triggered object-ofinterestimaging,” in Solid-State Circuits Conference Digest of TechnicalPapers (ISSCC), 2013 IEEE International, Feb 2013, pp. 478–479.
[2] P. Lichtsteiner, C. Posch, and T. Delbruck, “A 128 x 128 120dB30mW Asynchronous Vision Sensor that Responds to Relative IntensityChange,” in IEEE ISSCC Dig. Tech. Papers, Feb. 2006, pp. 25–26.
[3] N. Massari, M. Gottardi, and S. A. Jawed, “A 100W 64128 像素sContrast-Based Asynchronous Binary Vision Sensor for Wireless SensorNetwors,,” in IEEE ISSCC Dig. Tech. Papers, Feb. 2008, pp. 588–589.
[4] G. Kim, M. Barangi, Z. Foo, N. Pinckney, S. Bang, D. Blaauw, andD. Sylvester, “A 467nw cmos visual motion sensor with temporalaveraging and 像素 aggregation,” in Solid-State Circuits ConferenceDigest of Technical Papers (ISSCC), 2013 IEEE International. IEEE,2013, pp. 480–481.
[5] T. Ohmaru, T. Nakagawa, S. Maeda, Y. Okamoto, M. Kozuma,S. Yoneda, H. Inoue, Y. Kurokawa, T. Ikeda, Y. Ieda et al., “6.5 25.3wat 60fps 240160-像素 vision sensor for motion capturing with in-像素non-volatile analog memory using crystalline oxide semiconductor fet,”in Solid-State Circuits Conference-(ISSCC), 2015 IEEE International.IEEE, 2015, pp. 1–3.

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码