基于嵌入式ARMv7的监测飞行器系统设计
3 系统的软件设计
3.1 飞行器的总体工作过程
首先由遥控器控制飞行器起飞,主控模块开始控制飞控模块,将飞控模块的各传感器数据采集到主控模块,主控模块进行数据处理分析,控制飞行器达到稳定飞行状态。其次,主控模块控制信息采集模块,将各种传感器信息采集后,由主控模块进行数据处理,经过无线通讯模块将数据发送至pc终端或手持设备(平板电脑、手机),完成数据的处理。
3.2 飞行器飞行控制流图
控制端和飞行器建立通信之后,利用无线通信向飞行器发送控制指令,无线通信模块将数据接收,并发送给主控模块,主控模块对指令进行识别,并向飞行控制模块发出信号,飞行控制模块最终控制动力模块做出相应的指令。其飞行控制流图如图4所示。

3.3 飞行器实时视频采集流图
主控模块通过控制信息采集模块中的摄像头,读取实时视频信息,并通过M—JPEG STREAMER发送视频流,最终通过无线通信模块发送给控制端,其流图如图5所示。

3.4 飞行器传感器实时数据采集
主控模块通过控制信息采集模块中的传感器,读取传感器采集的实时数据信息,将传感器数据写入XML文件,最终通过无线通信模块发送给控制端,控制端再通过解析XML文件获取到传感器实时数据信息,并做出显示,其流图如图6所示。

4 系统功能测试
本系统可以在Android系统中,通过飞行器上搭建的BOA服务器,下载飞行器上的传感器数据XML文件,并在手持终端的应用程序中进行XML文件解析,以读取实时的监控信息。遥控器通过2.4 G射频与飞行器相通信。
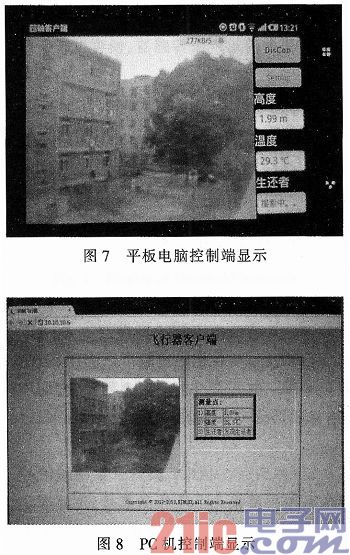
PC机通过飞行器上搭建的BOA服务器,可以直接读取飞行器发送来的视频流,同样通过解析XML文件的方式,读取飞行器上的传感器数据。与手持终端不同的是,PC机上不需要额外安装客户端或配置环境,打开飞行器搭建的网页即可进行数据接收。手持终端显示如图7所示,PC端显示如图8所示。
5 结论
本系统采用嵌入式UP-CUP IOT A8-II平台,结合数据采集模块和无线通信模块设计了一款飞行控制系统。该飞行器具有重量轻、体积小、动力足、机动灵活和安全性高等优点,同时该系统结合当前嵌入式物联网电子技术,使其具有超低空机动飞行、定点悬停降落、实时视频采集、生命探测等功能,可以广泛应用在城市交通探测、地震侦察救援、气象监测等领域。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码