基于CAN总线的电动汽车能量回收系统研究

图4 主程序框图
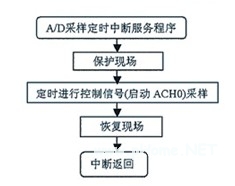
图5 中断服务程序框图1
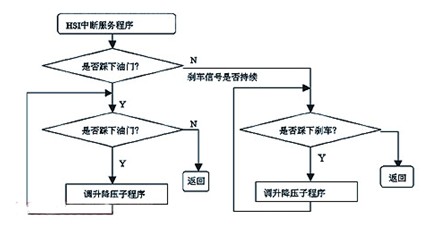
图6 中断服务程序框图2
为了便于软件的编写和调试、控制算法的改变和分析使用,软件采用了模块化结构。系统软件由主程序、子程序、中断服务程序组成,图4、5、6分别给出了主程序及2个中断服务程序软件框图。
初始化中应设初始值及设定全局变量,初始化各中断服务程序用到的中断向量,并设置软件结构,重置优先级顺序。
a/d采样中断服务程序利用80c196kc的高速输出器hso的cam锁定位,定时启动ach0通道。加减速中断服务程序中使用了80c196kc的高速输入器his记录某一外部事件发生的时间,用于判断加速、减速信号,这使得程序的编写非常简明。
5 结束语
本系统的软硬件均采用了模块化设计,通用性好、灵活性强,可作为开发平台,便于扩展,是一个开放式的分布式控制系统,易于实现人机对话和远程通信。
参考文献
[1] 阳宪惠. 现场总线技术及其应用[m]. 北京:清华大学出版社,1999.
[2] 孙逢春. 电动汽车[m]. 北京:北京理工大学出版社,1997.
[3] 葛林等. can通信网络在汽车中的应用研究[j].汽车技术,2000,(11).
[4] 王兆安. 电力电子技术[m]. 北京:机械工业出版社,2001.
1
2

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码