北斗RNSS/RDSS多模手持终端设计与实现
2 软件部分
2.1 嵌入式系统UCOS介绍
μC/OS-II是一种可移植的,可植入ROM的,可裁剪的,抢占式的,实时多任务操作系统内核。它被广泛应用于微处理器、微控制器和数字信号处理器。
2.2 硬件初始化介绍
硬件初始化顺序为:(1).时钟初始化。(2).AD初始化 (3).串口初始化 (4).IO口初始化。
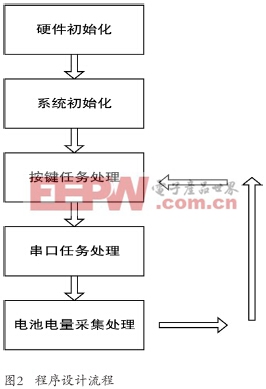
2.3 程序设计流程介绍
系统上电后,先进行硬件初始化,然后操作系统初始化。系统工作分为3个任务,分别为按键任务,串口通信任务,电池电量采集任务。如图2所示。
3 结构部分
本设备包含3个指示灯,放置于设备右侧中部,开机按键放于右侧上部,一键报警按键放于灯下部,按键陷于外壳中,防止按键误碰,设备背部放置拉带便于携带,前部中间放置IC卡,外部加固定挡板。设备上下部放置卡壳,用于GYT2002A终端固定。
4 测试情况与性能指标
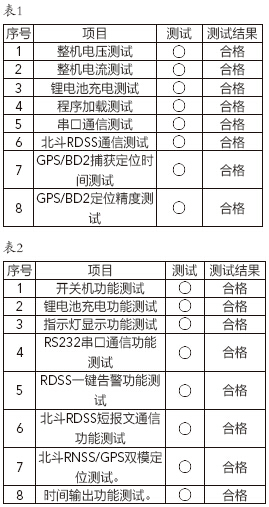
4.1 终端测试情况
1)板卡测试:
2)整机测试:
4.2 性能指标
(1)北斗RDSS短报文通信指标:
接收灵敏度:
误码率:≤1×10-5(方位角0°~180°,仰角20°~49°,接收信号电平≤-154.6dBW)
误码率:≤1×10-5(方位角0°~180°,仰角50°~90°接收信号电平≤-157.6dBW)
发射信号功率:5W
首次捕获时间:≤2s
失锁重捕时间:≤1s
(2)GPS/BD2
捕获时间:
冷启动时间(混合定位模式):≤32秒
热启动时间:≤1秒
重捕时间:≤1秒
接收通道数:≥99
定位精度:
水平≤10米(RMS)
定位数据输出频度:1Hz
时间精度:小于1秒
1
2

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码