采用ATMEGA16单片机设计的两轮自平衡电动车
2.2车模行走控制方案
两轮自平衡车的速度是通过车轮的速度实现的。车轮的速度通过直流电机经过减速箱,增大扭矩。利用直流电机驱动器控制电机的正反转和PWM调速系统控制两轮自平衡车的平稳运行。然后通过电机的加速度控制车体的平衡,通过电机的恒定速度和静止状态控制车体的匀速运动和静止状态。
在运行的过程中当人体的倾角增大时车轮的加速随之增大以控制车体的平衡,当车体恢复平衡时,以恒定的速度匀速前进。
当转把转动时可实现自动复位功能,在转把的轴径方向安装一个大强度的弹簧,使转把在转动的过程中自动恢复原位,实现了灵活转弯的效果,如果转把的偏向角足够大可以实现原地转弯,使两轮车的运行更加灵活,方便在狭小的地方使用。转把示意图如图4所示。
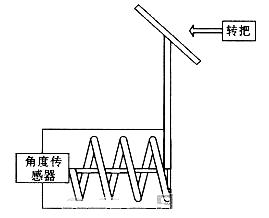
图4转把示意图
转把的方向和偏向角是通过高精度电位器检测的,在转把的固定轴上安装个角度传感器,实现角度的测量。
3程序流程图
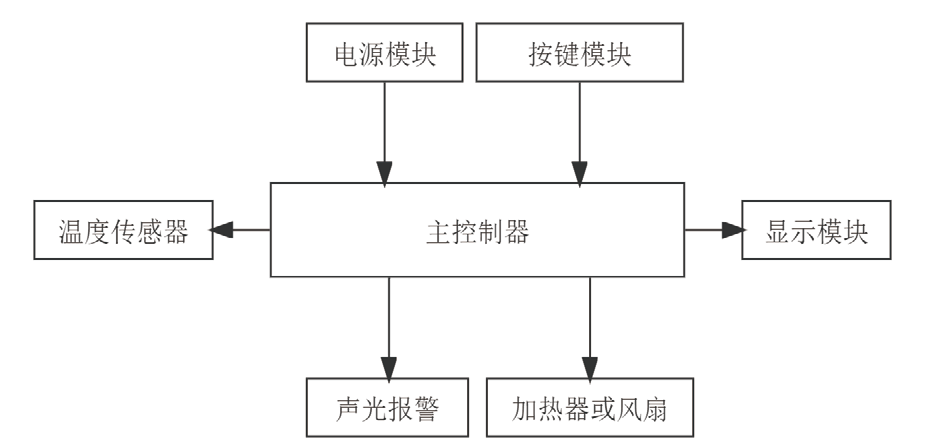
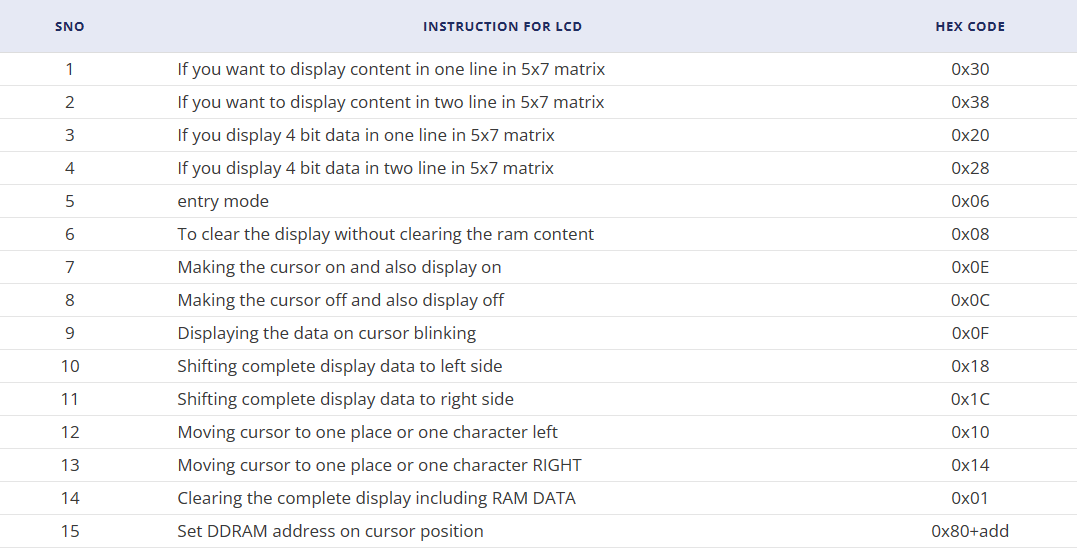
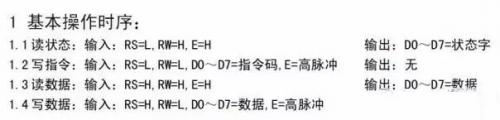
为了便于程序的开发和以后的使用与维护,全部程序采用模块化结构,即由一个主程序和若干个子程序模块构成。主程序首先完成初始化工作,包括定时器初始化、LCD16 02液晶模块初始化、定时器中断初始化、系统时钟初始化、其他参数的初始化等。然后启动定时器进行定时,开中断允许单片机响应内部中断请求。定时器中断流程图如图6所示。各程序功能模块包括LCD1602液晶显示、电机驱动、动态角度测量、转向、欠压报警等。主程序流程图如图5所示。
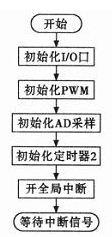
图5主程序流程图
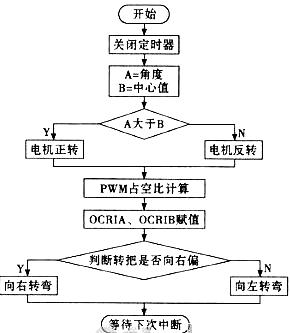
图6定时器中断流程图
整个系统软件采用模块化结构。软件系统包括:主程序负责显示。车体直立模块用定时器1中断完成,每进入一次中断完成一次PID算法控制车体平衡,在车体保持平衡状态的情况下通过采集转把数据实现转弯功能。
4总结
本系统采用ATMEGA16控制芯片简化了系统的硬件结构,提高了系统的可靠性和实时性。利用MMA7260和ENC-03MB可以精确地测量出车体的动态角度和角速度,采用大功率MOS管和板桥驱动芯片可以很好地去除MOS管的发热问题,减少能量的损耗。本电动车采用锂电池供电既节能又环保,本设计的两轮自平衡电动车可以在狭小的环境中行走自如,使出行带来方便。本系统对实际工程应用有一定的指导意义。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码