基于电力载波通讯的自组网路灯远程监控
编者按:为了满足当前路灯控制系统的智能控制要求,文中介绍了一种基于电力载波(Power Line Carrier)通讯的自组网路灯远程监控系统。该系统以自组网的方式,利用现有的电力线作为通信通道,将每个路灯上的电力载波模块终端连接起来,采用上位机软件(PC software)接收与发送数据,组成路灯信息交互网络(Information Exchange Network)。每个电力载波终端连接一个单灯控制器,可以根据上位机信号控制该路灯的运行情况。实验表明,该系统稳定、可靠,有很强的的实用性。
2.2 端到端数据传输阶段
网络初始化完成后,路由已经建立,便进入端到端数据传输阶段。此阶段PC 可以点名方式把控制命令发送给单灯控制器,后者也可把报警信息上报给PC。载波集中器与载波终端 之间进行的是无确认的传输,控制命令的确认由PC层面完成。
在理论上载波路灯监控系统中,PC每发送一条Command给单灯控制器,后者返回一条Response给PC,Response 中会带回控制与查询结果。Command 与Response 各有 3 次重传机会(可更改),即在规定时间内未接收到返回命令即重发该命令。 控制命令包根据应用不同其数据长度不同,而载波是采用固定长度的突发数据帧方式,必然存在一条控制命令包被分成多个载波数据帧的情况(称为多个分包),在自组网协议中,对每个分包会进行编号,并进行无确认的传输,如果有分包丢失或误码,则所有分包全部丢弃,由PC继续对数据包重传。 单灯控制器的主动报警也属于数据传输。当在控制过程中有节点报警,或者多个节点同时报警,信道上必然出现载波冲突,此时通过载波侦听-冲突退避(CSMA / CA)机制进行避让,实现各个节点按序上报,自组网协议采用CSMA 算法,采用标准的二进制指数退避。
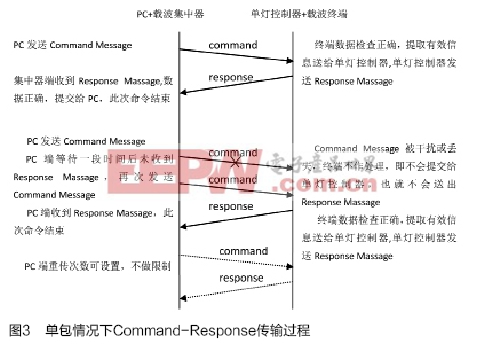
由于路灯远程控制系统传输信号较为简单,可采用单包形式(如图3所示)。下面给出单包情况下PC与单灯控制器之间的数据传输过程,假设应用层协议设计为PC每下发一条 command message,单灯控制器即返回一条 response message。
3 系统软件设计
3.1 软件系统框架设计
本系统由上位机软件系统、集中控制系统与节点控制系统(包括载波终端和单灯控制)构成,其中以上位机软件系统为核心。多个节点控制器通过电力线与上位机系统进行数据间交互传输。发送的每个数据均为十六进制代码,每次发送与接收都需要软件自行分析与编译。在每条语句的最后,都要加上两个8位CRC校验码,将低位放在前面,高位放在后面。CRC校验码的计算由Modbus的定义编写C子函数和VB子函数,每次需要进行CRC校验或计算的时候,直接调用子函数,非常方便。每次发送数据前都要重新进行CRC校验,以保证每次数据的正确性。各个分机都会接收来自电力线上所有的载波信号,但只会处理跟自己域名相同的命令。载波集中器会接收电力线上所有的载波信号,经过CRC校验后,直接发送给上位机软件系统,由上位机对各个节点控制器的状态信息进行综合分析,处理和显示等工作。工作原理如图4所示。

3.2 上位机设计
集中控制器的上位机软件既要完成网络初始化配置,以树状图显示网络拓扑结构和人工修改路由配置或添加新节点的功能,同时可发送命令控制节点,并接受节点反馈信息做出相应的响应。
上位机主界面分成上下两个功能区(如图5所示),上部分为操作区,包括串口配置(COM Config),网络初始化(Networking Initializing),数据传输压力测试(Polling Test),人工添加节点(Add Node),报警及关控制(Alarm,All Light)。下部分为显示区,包括主显示区,串口发送与接收数据显示,网络拓扑图显示(Network Topology),自定义控制命令区。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码