小波变换和motion信号处理:第二篇
当然,如果这个scaling function只是用来代表一个子空间的,那它的地位也就不会这么重要了。刚才我们提到,这个嵌套空间序列有一个性质,
。这就是这个函数,如果你对它频域的放大或缩小,它就会相应移到下一个或者上一个空间了。这个性质就有意思了,它代表什么呢?对于任何一个包含V0的更上一层的空间来讲,他们的基都可以通过对scaling function做频域的scale后再做时域上的整数变换得到!推广开来就是说,当
我们有
这也就意味着,对于任何属于V_j空间的函数f(t),都可以表示为:
到这里,我们就明白这些个子空间和那个凭空冒出来的scaling function的作用了。scaling的构建这些不同的子空间的基础,当j越大的时候,每一次你对频率变换后的scaling function所做的时域上的整数平移幅度会越小,这样在这个j子空间里面得到的f(t)表示粒度会很细,细节展现很多。反之亦然。通俗点说,就是对scaling function的变换平移给你不同的子空间,而不同的子空间给你不同的分辨率,这样你就可以用不同的分辨率去看目标信号。
下面就是时候看看什么是MRA equation了,这是更加有趣,也是更加核心的地方。通过刚才的讲解,V0属于V1,那scaling function
是在V0中的,自然也在V1中了。我们把他写成V1的基的线性组合,那就是
其中的h(n)是scaling function的系数,也叫做scaling filter或者scaling vector,可以是实数,也可以是虚数。根号2是为了维持norm为1的。看,在这个公式里,我们就把属于V0的函数用V1的基表示出来了。同理,我们可以循环如此,把属于V0的
在V2, V3, …, Vn中表示出来。这些方程就是MRA equation,也叫refinement equation,它是scaling function理论的基础,也是小波分析的基础之一。
好,稍微总结一下。到现在,已经讲了关于scaling function的基本理论知识,知道了信号空间可以分为不同精细度的子空间,这些子空间的basis集合就是scaling function或者频率变换之后的scaling function,如下图所示:
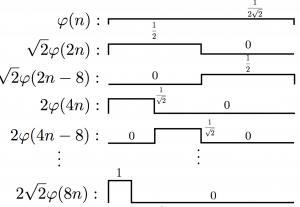
上图就是四个子空间的basis集合的展览。通过前面的讨论,我们还知道,一开始的scaling function可以通过更精细的子空间的scaling function(它们都是对应子空间的basis)来构建。比如
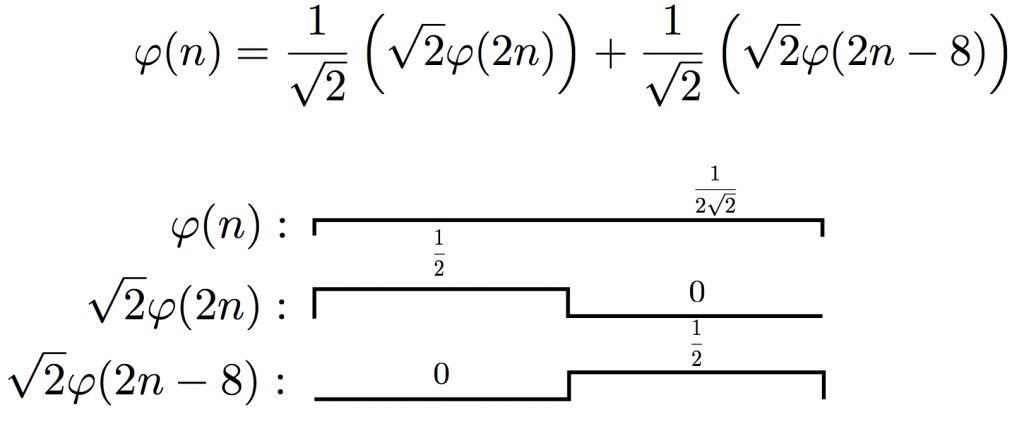
对于更加finer的scale:
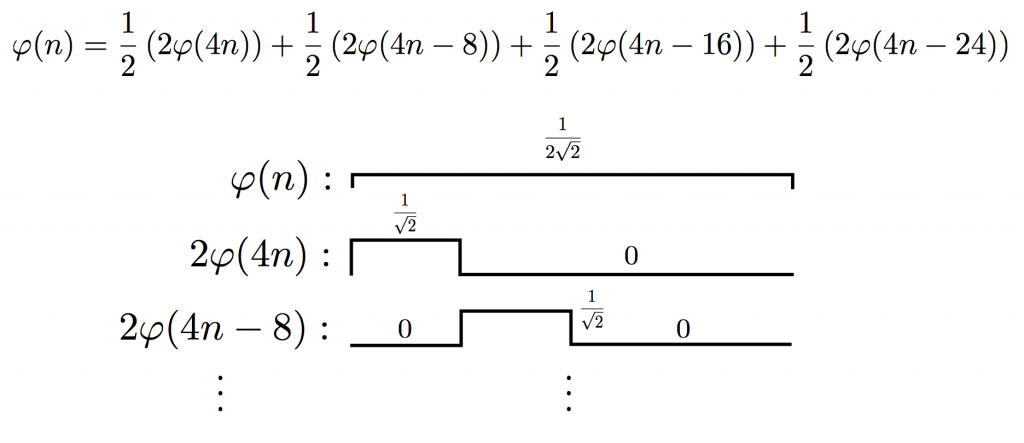
图2
依此类推。实际上,对于任何scale和translate过的scaling function,都可以用更加精细的scale层面上的scaling function构建出来。
然后,我们有各种scale下的scaling function了,该看看它们分别所对应的嵌套的空间序列
了。先看看V0,自然就是以基本的scaling function为基础去span出来的:
这个不新鲜,刚才就讲过了。这个子空间代表什么样的信号?常量信号。道理很简单,这个scaling function在整个信号长度上,没有任何变化。继续往下看:
这个相比V0更加finer的子空间,代表着这样一种信号,它从1-4是常量,从5-8是另一个常量。同理我们有:

V2代表的信号,是分别在1,2; 3,4; 5,6; 7,8上有相同值的信号。那么V3呢?则表示任何信号,因为对于V3来讲,任何一个时间刻度上的值都可以不一样。而且现在,我们也可以通过上面的一些scaling functions的波形验证了之前提到的多解析度分析中的一个核心性质,那就是:
我们之前讲了一堆多解析度的理论,但直到现在,通过这些图形化的分析,我们可能才会真正理解它。那好,既然我们有一个现成的信号,那就来看看,对这个信号作多解析度分析是啥样子的:
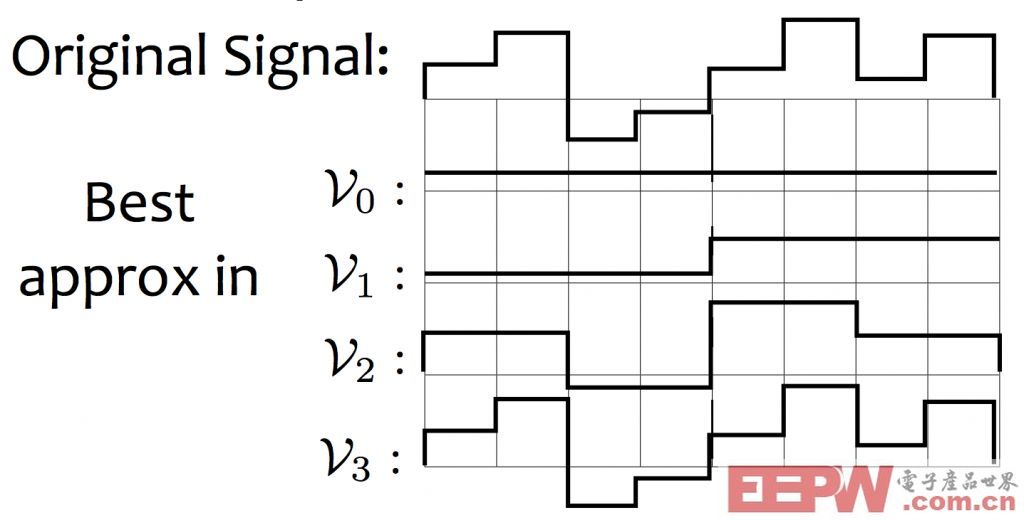
你看,在不同的子空间,对于同一个信号就有不同的诠释。诠释最好的当然是V3,完全不损失细节。这就是多解析度的意义。我们可以有嵌套的,由scaling function演变的basis function集合,每一个集合都提供对原始信号的某种近似,解析度越高,近似越精确。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码