如何保护汽车电池系统免于瞬变、短路和其他故障影响?
ACPL-K49T是一个包含LED发射器、隔离屏障、光二极管接收器以及一个晶体管放大器,结构非常简单的单通道光电耦合器,请参考图3左方,这个器件可以处理高达20Kbits/s的数据率,提供VCM=1,500V时30kV/μs的高共模抑制(CMR, Common Mode Rejection)能力以及最低4mA的低LED驱动电流,相反地,ACPL-M72T则具有更为复杂的接收器侧结构,将光二极管耦合到跨阻放大器以及一个电压比较器的输出驱动电路以便可以更好的处理SPI总线的驱动,请参考图3中间,这个光电耦合器可以高达10Mbits/s的数据率工作,传播延迟最大为100ns,并且耗电流也仅为4mA。
要对电压敏感线路进行隔离处理以保护微控制器不受瞬变或噪声影响,可以使用如ACPL-782T等模拟光电耦合器感应电池阵列的模拟电压,并把结果送到电池管理系统的微控制器,如图3右方。接着微控制器将它与所有电池电压单元的电压总合比较,进行系统是否正常运作的诊断,并在必要时送出警告信息给汽车中其他子系统来警告操作者发生了问题,另外,微控制器也可以送出反馈控制信号到电池阵列的充电电路,调整充电参数或在检测出严重故障时关闭充电系统。
在典型的实现上,分布在一系列串接电阻上的电池电压会通过如图1中ACPL-782T的一个端点进行感应,并于ACPL-782T光电隔离屏障的另一侧产生差分输出电压,这个差分输出电压正比于电机电流,因此可以被转换为单端信号,由于在现代的开关变频电机驱动电路中共模电压会在数十纳秒内出现数百伏特的变动,因此ACPL-782T在设计上可以忽略极高的共模瞬变电压变化率,最低为10kV/μs,ACPL-782T隔离放大器的高共模抑制(CMR)能力提供了在高噪电机控制环境中精确监测电机电流和直流电压所需的精确度和稳定度,为各种不同形式的电机控制应用带来更平稳的控制。
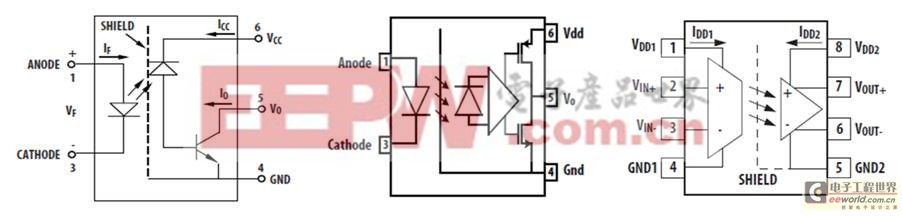
图3 SPI接口使用了两种不同形式的光电耦合器
左方的ACPL-K49T是一个低速器件,可以简单处理片选信号,中间的ACPL-M72T则是一个带有跨阻放大器和输出驱动电路以处理更高信号速度,如时钟、串行数据输入以及串行数据输出的较高速光电耦合器,右方的ACPL-782T显示差分电压和电流感应能力使得这个器件成为电池和电机监测应用的良好选择。
当数据送到电池管理系统的微控制器时,微控制器会进行数据分析,接着通过CAN总线将控制信号送到充电管理系统、传动系统、仪表盘以及其它汽车子系统,依微控制器选择的不同,CAN控制器可以和微控制器集成到相同芯片上,也可采用独立的芯片,在大多数系统中,CAN控制器为独立芯片,原因是这样做可在微控制器和CAN控制器间加入隔离而非在CAN总线本身,请参考图4,在这样的应用环境中,CAN总线可以最高速度工作,不会受到光电隔离器的限制。
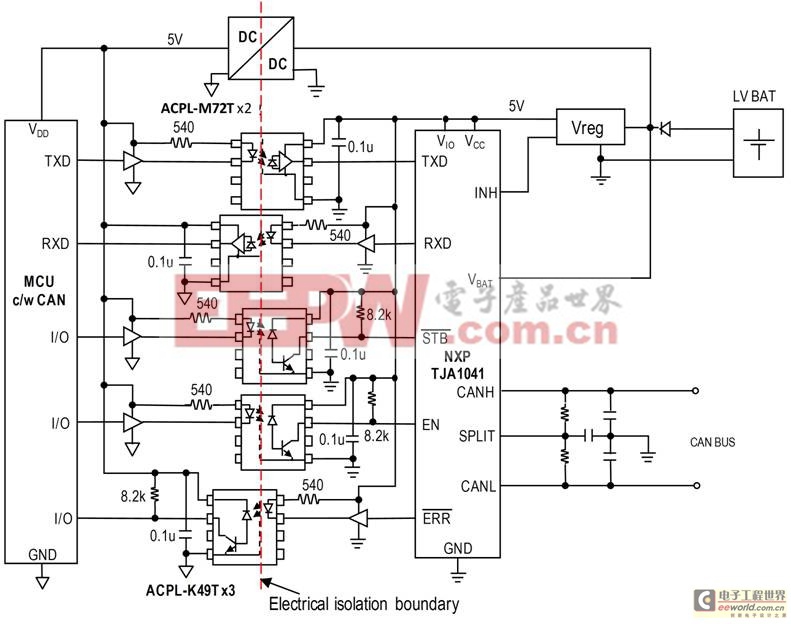
图4:微控制器和CAN总线控制器间的5个信号线经过光电隔离以避免噪声、瞬变和高电压脉冲影响信号完整性或破坏低电压电路。
在这样的设计下微控制器上就形成了双重隔离,输入侧有SPI总线上的光电耦合器,输出侧则有微控制器输入输出引脚和CAN控制器输入间的光电耦合器。图4中的子系统显示共有5个光电耦合器提供对CAN控制器的隔离,其中3个为低速光电耦合器如ACPL-K49T,它也被使用在电池管理系统控制器和微控制器间的片选信号线,CAN子系统中其他2个光电耦合器则被使用于微控制器和CAN控制芯片间的数据传送和接收,这些光电耦合器必须能够处理高了许多的数据率,通常大约为500kbits/s,因此ACPL-M72T和相似的光电耦合器就成为这个隔离需求的适当选择。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码