公路划线机划线导向机器人的设计
4电机驱动履带行走系统
机器人的移动方式有轮式、步行式和履带式。步行式结构设计复杂且移动缓慢,但步行机器人可以适应条件较差的路面。轮式结构机动性强,但却只适用于平坦的地形。而履带式结构具有运动平稳、爬坡能力强、不易倾倒等特点;克服了轮式移动机构越障能力、跨沟能力差及打滑等缺点[2-3]。
本文提出的划线导向机器人应用于路况较好的公路,但考虑到本机器人是找寻公路的中线行走,轮式结构虽然机动性较好,但其在路面适应能力上远不如履带式移动方式。结合各种情况本机器人采用两节并行履带连接方式,其移动方式类似坦克的行走机构。两边的履带安装在前后轮上,后轮由直流电机驱动,通过履带带动前轮一起转动。其结构示意图如图3所示。用履带式结构机器人不仅可以直行,而且可以利用履带的差动实现原地转向。该结构简单,不需要差动器,转向机构等。控制方便,转弯半径小,电机既可以提供前进动力,也可以提供转向动力[3]。
驱动轮直流电机选择带减速器的直流电机,电压为24V。蓄电池的电压为24V,包括工作蓄电池和备用蓄电池。工作蓄电池不仅给直流电机供电,还给控制单元供电。备用电池用于工作蓄电池损坏或突然无电的情况下。
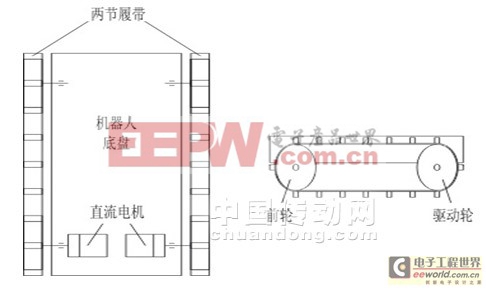
图3履带式移动方式结构示意图
Fig.3Thestructureofmovingway
5涂料喷涂系统
划线机按标线所使用的材料分为:冷漆划线机和热塑划线机。冷漆划线机即在常温下进行喷漆,它有两种类型,即气喷涂式和无气喷涂式。气喷涂是靠压缩空气将漆雾化,然后通过喷枪嘴喷涂于地面。无气喷式划线机是利用专用高压泵对漆施加10~15Mpa的压力,然后通过喷枪喷涂于地面。热塑划线机是将热熔油漆或热熔塑料(有颗粒状和块状两种)在热熔罐中加热至使用温度后,再通过划线装置划于地面的。其划线装置的划线方式分为:刮涂式、挤压式和喷涂式[4]。结合本文划线机划线导向机器人的应用重点是导向机器人给划线机提供标线,所以导向机器人的涂料喷涂系统不会像划线机上的喷涂系统那么复杂,只需要满足能够给划线机提供可以识别的标线即可。
本文涂料喷涂系统采用冷塑无气喷式,即在常温下利用专用高压泵和喷枪进行喷漆的方法。其基本组成有:高压泵、涂料箱、喷枪及其控制喷枪的电机。涂料喷涂工作过程:高压泵向涂料箱中进行加压,当控制喷枪的电机得到控制单元的指令时,电机开始工作并使喷枪喷出涂料。本系统安装在履带式底盘后部,喷枪安在中线上,机器人行走时,喷枪对准地面进行喷漆。
6总结
与目前传统的公路划线机划线过程相比,本机器人有以下几个特点:第一,本机器人实行自主寻找中线方向,不需要人为操作。第二,本机器人给公路划线机提供较精确的中线标线,不需要人工标线,大大地减轻了工人的工作量。第三,本机器人结构简单,PLC控制系统稳定性较强,能适应于恶劣的野外环境。
本文创新点:将PLC用于控制系统,适用于环境恶劣的野外作业,稳定性强。应用了履带式的移动结构,可应用于复杂的路况,机器人移动性能稳定。
参考文献:
[1]刘湘晨,薛龙,戴静君.公路划线机的应用现状和发展方向[J].北京石油化工学院学
报,2004,9:62-64
[2]刘涛.智能移动驱鼠机器人的研制[D].成都:西南交通大学,2008
[3]黄巍炜.基于ARM的履带式移动机器人设计[D].杭州:浙江大学,2006
[4]沈松云.国外划线机[J].建筑机械,1998:38-39
[5]王慧利.基于视觉的道路划线机自动检测装置[D].沈阳:沈阳工业大学,2007
[6]吴云亚,阚加荣.公路振动标线划线机控制系统[J].盐城工学院学报(自然科学版),2006,12:31-33
[7]吴慎山,聂惠娟,吴东芳,付会凯.智能超声波测距系统的设计.河南师范大学学报(自然科版),2007,5:86-88
[8]陆季挺.离心喷涂式热熔道路标线划线机及应用[J].筑路机械与施工机械化,2006:27-28
[9]罗麦丰,陈小祝,霍大勇.西门子S7-200系列PLC在配料生产线上的应用[J].微计算机信息,2007,1-1:106-107。
1
2

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码