基于FPGA技术的全方位移动机器人运动控制系统的方案设计
样时刻的计算机输入误差值;e(k-1)为第k-1个采样时刻的输入误差值;Kp为比例系数;KI为积分系数;KD为微分系数。

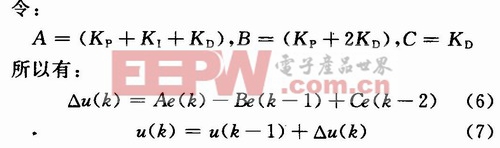
这种算法虽然比较直观,但由于是全量输出,所以每次输出均与过去的所有状态有关,计算时要对e(k)进行累加,计算机运算量大。
于是产生了增量式PID算法:
上述公式(7)为增量式PID控制算法。只输出控制增量,误动作影响较小,且控制增量只与最近几次的采样值有关,容易通过加权处理获得比较好的控制效果。
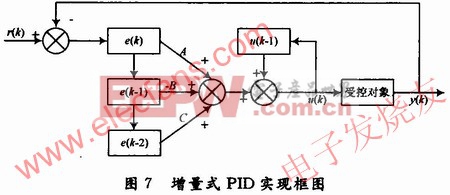
根据以上公式推导,结合FPGA的工作特点,本文设计了适合FPGA的增量式PID实现结构。
由图7可以看出,增量式PID控制算法程序结构,只要最近的3个误差采样值就可以加权计算。这在FPGA内部完全可以并行实现,移位部分结构类似FIR滤波器的实现结构,难点是FPGA设计时对有符号数的熟练操作和保证累加器不能溢出。
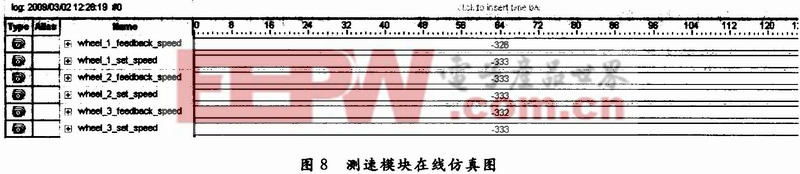
一种高效的硬件测试手段和系统测试方法,它能够获取并显示可编程片上系统(SOPC)的实时信号,它可以随设计文件一起下载到FPGA中,用于捕捉FPGA内部节点和I/0引脚的状态,就如同使用真的逻辑分析仪一样,对设计进行在线仿真,但又不影响硬件系统的工作。为了检验测得的全向轮实际速度值是否准确,对设计的测速模块进行了在线仿真。设定每个全向轮以固定的速度转动,对比测得的实际速度值和设定的速度值,如图8所示。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码