双天线GPS/SINS组合导航系统设计
编者按:本系统作为浅组合导航系统的一种,利用了双天线定向GPS与光纤陀螺的组合,以基于DSP+FPGA多处理器结构作为导航计算机平台,在原有的位置与速度基础上加入了姿态作为第三个量测量,应用卡尔曼滤波算法将GPS姿态信息作为对惯性导航系统数据的初始值和修正。设计的系统通过跑车实验验证后表明达到了设计要求,具有实时性好,运算精度高等优点。
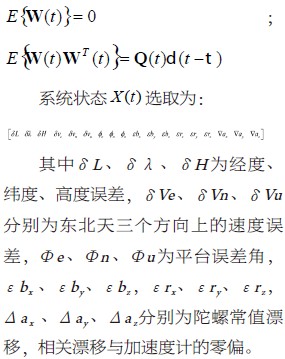
其中F(t)是18*18阶的状态转移矩阵;W(t)为18维的状态噪声向量;下列各式给出了状态方程的系统噪声性质:
而其中失准角误差方程为:

(2)组合导航系统的量测方程
由于系统将定向GPS给出的数据作为修正数据,系统量测值在位置和速度值的基础上加入了姿态信息。位置量测值为惯导系统与GPS给出的纬度、经度和高度差,相应的速度量测值为惯导系统与GPS给出的在惯性系统中各坐标下的差值,而惯导系统与双天线GPS给出的姿态差值作为第三组量测值。
惯导系统与GPS位置量测信息在地理坐标系以真值和误差表示如下[4]:

与位置量测方程形式相似,速度量测方程表示如下:


加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码