各类运动传感器工作原理揭秘
3轴地磁传感器
地磁传感器用于测量地球的磁场,进而推导出航向。历史上曾用于罗盘的地磁传感器如今被大批量用于种类广泛的应用,包括汽车罗盘(在后视镜中)、手表、雷达探测器、传动轴和机器人。然而,真正广泛的采用起始于iPhone 3GS,它是美国首款包含罗盘并得到广泛普及的智能手机。
● 磁力传感器的主要问题是它们测量所有磁场,不仅是地球磁场。例如,像电池或含铁元件等系统元件将干扰传感器附近的磁场。这些被认为是系统内的固定干扰,可以通过校准进行补偿。
● 更大的问题是改变局部磁场会临时性地干扰航向信息。桌椅上的金属部件、开过的汽车、附近的其它手机和电脑、窗框、建筑物内的雷达等物件都会干扰读数。补偿这些磁场和其它瞬时地磁异常要求开发出复杂的算法,以便有效地将地球的磁场与其它临时性“侵入”磁场区分开来。
传感器融合——将传感器转变为运动跟踪
如前所述,加速度计、陀螺仪和地磁传感器每个都有各自的优缺点。下表1总结了每种传感器在运动跟踪方面的主要优势和问题。
正如表1总结的那样,一种传感器的优势常常是另一种传感器的问题,反之亦然。通过智能地“融合”它们的输出,依靠一个输出调整或代替另一个的结果,我们可以创建出一个9轴的运动跟踪系统,其性能将远好于这些器件的简单累加。
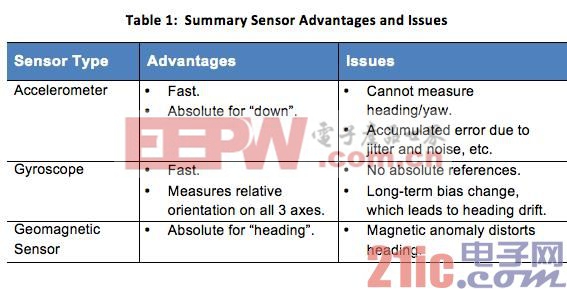
表1:传感器优势和问题总结。
今天,9轴“传感器融合”系统刚刚开始普及。陀螺仪被确立为这些融合系统的主力,因为它具有良好的短期跟踪精度、快速的响应和更新速率以及对非重力加速度的免疫。陀螺仪的问题——1)没有绝对基准2)由于零偏漂移而具有严重的航向漂移——可以通过联合运用加速度计和地磁传感器一起解决。地磁传感器和加速度计可以给陀螺仪提供航向、倾斜和滚动用的长期绝对基准。
但运动跟踪的最终精度直接取决于来自各个传感器的原始输入有多好。正如我们将要看到的那样,并不是所有地磁传感器都提供相同的结果。
在今天的消费电子产品中使用最广泛的地磁传感器是霍尔效应传感器。这种传感器主导消费市场的原因是体积小、价格低并且节省功耗。但这种传感器同样有噪声,很容易受其它磁场干扰,这些问题如果不校正将限制其向陀螺仪提供正确航向数据的能力。然而,如果能够接受稍大尺寸的永磁感应式地磁传感器,就可以在不牺牲成本或功耗的情况下获得显著改进的噪声与分辨率性能。表2显示了霍尔效应和永磁感应传感器的规格。注意,永磁感应传感器可以提供明显更低的噪声和更高的分辨率。
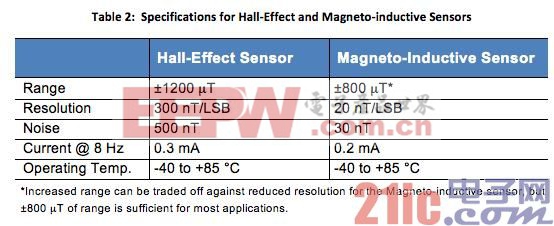
表2:霍尔效应和永磁感应传感器规格。
下图显示了地磁传感器在磁场强度为2.4mT数量级的固定位置旋转时输出的磁场读数。在图5中,传感器旋转了整整360°,而在图6中,传感器从0°旋转到90°。这两张图都绘出了霍尔效应传感器、永磁感应传感器和理想传感器的试验数据。
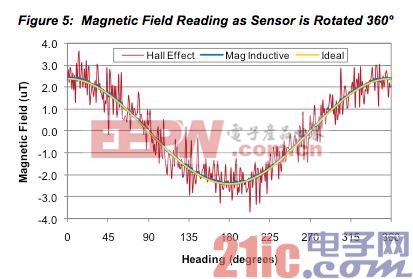
图5:当传感器旋转360°时的磁场读数。
从图中可以看出,霍尔效应传感器的噪声要比永磁感应传感器大得多。这与器件参数规格一致,因为霍尔效应传感器的噪声指标为500nT,而永磁感应传感器噪声指标要低一个数量级,只有30nT。如图6所示,对霍尔效应传感器来说,可以在多个方向观察到2mT的磁场读数,而2mT的读数可以代表从5°到60°的任何航向。虽然超采样可以减少这种不确定性,但这种非常明显的传感器噪声差异确实会导致很大的测量不确定性。这种噪声差异和相关测量的不确定性将显著影响9轴传感器融合算法的性能表现。
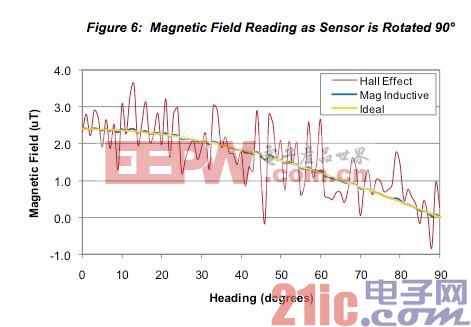
图6:传感器旋转90°时的磁场读数。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码