基于WLAN与单神经元自适应的空调系统设计
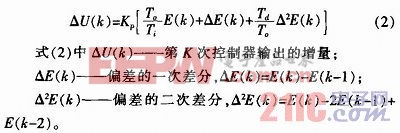
常规PID控制器的控制算法式为
式(1)中为实际值与给定值的偏差,e(t)=yr-y;Kp为比例增益;Ti为积分时间常数;Td为微分时间常数。当采用周期T。较短时,离散化后,可得常规PID控制的增量型算式为:
结合以上的常规PID调节器的控制机理,一个基于单神经元模型的自适应PID控制器的结构图如图3所示。
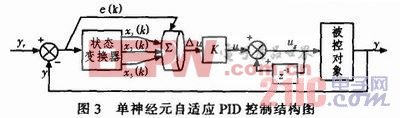
图中状态变换器的输入为系统的输出偏差信号e(k),yr为设定输入,y为过程的实际输出,ri为性能指标或递进信号,K为神经元比例系数,K>0。该单神经元控制器有3个状态变量xi(k)、x2(k)、x3(k),这里分别取为:
xi(k)(i=1,2,3)的这种取法有明显的物理意义:x1(k)反映了系数误差(相当于积分项),x2(k)反映了系统误差的一阶差分(相当于比例项),x3(k)反映了系统误差的二阶差分(相当于微分项)。本文的控制策略如下:

分别称为该神经元控制器的积分系数、比例系数、微分系数。
单神经元自适应控制器是通过对加权系数的调整来实现自适应、自学习功能的。考虑到加权系数应和神经元的输入、输出和输出偏差三者的相关函数有关,因此加权系数的调整采用有监督的Hebb学习规则,即:
式(6)、(7)中ri(k)——递进信号或学习信号,ri(k)随过程进行逐渐衰减;z(k)——输出误差信号,z(k)=y,(k)-y(k)=e(k);ηi——学习速率,ηi>0。
可以证明当偏差e(k)充分小时,wi(k)可收敛到某一稳定值
为保证上述控制学习算法的收敛性和鲁棒性,对上述学习算法进行规范化处理,得:
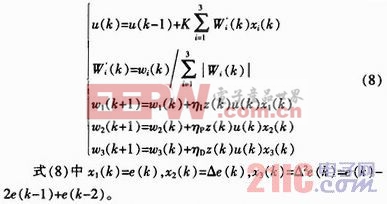
ηI,ηP,ηD——分别为积分、比例、微分的学习速率。由式(8)可看出,单神经元自适应PID控制器是依据学习信号所反映的误差与环境的变化来对相应的参数进行在线调整,并产生自适应控制作用,这充分体现了其强鲁棒性。
5 结束语
根据以上设计的空调系统,将WLAN技术与单神经元自适应PID控制结合起来,通过工控机实现实时监控,控制效果良好。选择WLAN技术不但减少了布线所需的人力物力的消耗,也增加了系统的灵活性、移动性。同时加上单神经元自适应PID控制,使系统具有无静差、无超调、鲁棒性好等优点。
1
2

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码