一种多制式传感器的数据融合算法
考虑到探测器各自形成的局部航迹可能发生批号交换的错误,导致某一探测器同一批号的航迹前后半段来自不同的目标。因此,在进行数据融合时可能出现以下两种情况:1)两条航迹前半段来自同一目标,而后半段来自不同目标:2)两条航迹前半段来自不同目标,而后半段来自同一目标。如果用测量相似度均值作为测量集相似程度的度量标准,则当局部航迹发生上述第一种错误后,已经相关的两条航迹不能及时分离;当局部航迹发生第二种错误后,航迹不能及时合并。为了解决这一问题,我们可以通过对“历史”加以衰减,使相似度主要依靠近期的测量值来确定的方法。即
。不管x的概率是什么,只要知道了观测误差的概率分布就可求出该估计。
对本文讨论的情况,对于同一个x存在一组探测{zi},使f{z}|x({z}|x)取得最大值的就是最大似然估计。已知任意两次探测相互独立,各探测分量(r,θ,φ等)也相互独立,且服从正态分布,即有:
根据此条件可以求出f{z}|x({z}|x)和grad(Inf{z}|x)。再用梯度下降法即可求出使ln f{z}({Z})取得最大值的就是目标位置的最大似然估计值。
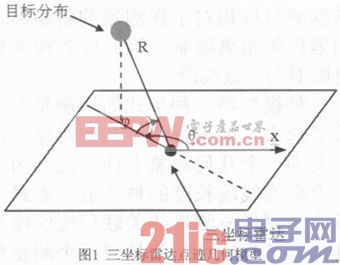
若上述测量集合{Zi}只包含一个两坐标探测器(两坐标雷达或红外探测器)点迹,则采用梯度下降法只能收敛到弧线段或直线段上,而无法收敛到一点。因此上面的估计只针对测量集合{Zi}至少包含两个探测器或包含三坐标雷达的探测系统的情况。
4 应用
在某项目研制中,应用本文所讨论的融合算法,三坐标雷达探得的目标和至少两个探测器同时探测得到的目标都能形成完整的三维融合点迹。而仅被一部两坐标探测器探测到目标的点迹集合无法通过前面的方法变成三维点迹。处理后的整个点迹序列表现为三维融合点迹和原始的二维点迹分段交替出现。为了得到最终的融合航迹,需选用一组恰当的卡尔曼滤波器组进行切换滤波。即当存在三维点迹时用探测值形式为(x,y,z)的卡尔曼滤波器进行滤波,当遇到无三维点迹时切换为两坐标探测器进行卡尔曼滤波,并且切换时沿用前一滤波器估计出的状态
向量和状态向量误差协方差作为滤波器的起始条件,由此就成功地融合出了完整的三维航迹,同时能很好地估计出目标速度和加速度。
5 结语
本文提出的多制式传感器数据融合算法能有效地解决多制式传感器系统中的数据融合问题;算法简单,易于工程实现。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码