异步电机无速度传感器矢量控制研究
以滞后环节1/(s+ω)代替纯积分环节,并引入转子磁链参考值ψr*作为幅值和相位误差的补偿,从而得到一种改进的电压型转子磁链观测模型如图3所示。
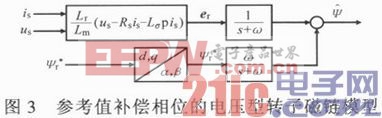
在参数准确的情况下,实际磁链ψr=er/s,观测磁链可表示为:
![]()
式中:er为转子产生的反电动势,er=Lr(us-Rsis-Lσpis)/Lm。
可见,在参数准确情况下,如果ψr*=ψr,式(9)右边第2项为零,于是有![]() ,所以改进型电压模型可以做到无幅值和相位误差。因此,这种改进型电压转子磁链观测模型可以在极低速的情况下得出比较准确的转子磁链观测结果。另外,当TL取为转子时间常数Tr时,由电机的定子电阻参数误差带来的磁链相位误差可以在低速时降到一个很低的水平。
,所以改进型电压模型可以做到无幅值和相位误差。因此,这种改进型电压转子磁链观测模型可以在极低速的情况下得出比较准确的转子磁链观测结果。另外,当TL取为转子时间常数Tr时,由电机的定子电阻参数误差带来的磁链相位误差可以在低速时降到一个很低的水平。
改进型电压模型的反电势输入端经过的不是纯积分环节,故在实际应用中没有纯积分环节的初值和漂移问题。该方法还有一个特点:当滤波时间常数ω取为与Tr相等时,观测磁链的角度在零转速附近对定子电阻的误差有鲁棒性。
4 硬件构成
双DSP数字化开发平台控制板以TMS320VC33作为系统的计算核心,TMS320LF2407A作为系统的控制核心,两个DSP处理器之间通过双口RAM
进行数据交换,并采用CPLD为程序存储器、数据存储器以及I/O口进行地址译码和读写控制。
5 试验
利用试验来验证所提出的无速度传感器矢量控制测速方法的正确性。其中试验电机参数:额定功率2.2 kW,额定线电压380V,额定电流为5 A,额定频率为50 Hz,额定转速为l 420 r·min-1,极对数为2,定子电阻2.54 Ω,定子漏感11.6279mH,转子电阻1.798 Ω,转子漏感11.627 9 mH,励磁电阻3.91 Ω,励磁电感235.071 8 mH。
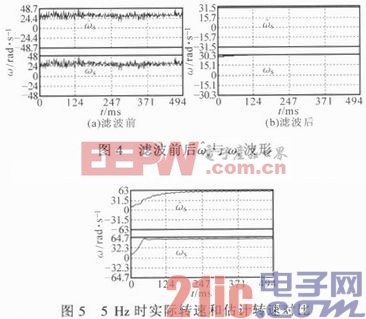
图4为滤波前后估计同步转速![]() 与转速ωs波形。滤波后
与转速ωs波形。滤波后![]() =31.423 9 rad·s-1,ωs=30.230 8 rad·s-1。转差为1.193 1 rad·s-1。同步转速给定为5 Hz转换为角速度31.415 9 rad·s-1。同步转速估计误差为0.292 rad·s-1,相对误差0.93%。图5示出转速5 Hz时实际转速和估计转速对比。由图可知,在转子频率5Hz时,电角度为62.8rad·s-1,估计转速误差最大为0.68rad·s-1,相对误差为1.08%。
=31.423 9 rad·s-1,ωs=30.230 8 rad·s-1。转差为1.193 1 rad·s-1。同步转速给定为5 Hz转换为角速度31.415 9 rad·s-1。同步转速估计误差为0.292 rad·s-1,相对误差0.93%。图5示出转速5 Hz时实际转速和估计转速对比。由图可知,在转子频率5Hz时,电角度为62.8rad·s-1,估计转速误差最大为0.68rad·s-1,相对误差为1.08%。
6 结论
采用TMS320LF2407A和TMS320VC33组成的双DSP系统为硬件基础,基本思想是利用改进型电压模型,实现同积分运算等效的幅值和相位特性。电机稳态工作时,转子反电动势信号是正弦波形。而一个频率为ω的理想正弦信号在经过积分环节运算后,输出相位滞后π/2,幅值变为原来的1/ω倍。
从试验中可知,观测得到的磁链与转子反电动势信号在输出相位上与通过纯积分环节得到的相位仍有一点偏差,故还需要对补偿环节上进行进一步研究,如何使其补偿相位完全等效于积分的效果。由试验结果可见,5 Hz时的转速估算误差很低,验证了所提理论的正确性。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码