基于串级PID控制算法的压控大功率电流源
摘要:提出了一种基于串级PID控制算法的压控大功率电流源设计方案。该电流源在内环电路采用PID控制电路,提高电流响应速度;外环电路采用数字PID控制算法,精确控制电流输出的串级PID控制模式。与传统电流源相比,该电流源具有输出功率大,可输出多路不同波形电流,且幅值频率可调范围大,脉冲电流上升时间短等优点,具有更好的通用性。
引言
大功率电流源在半导体激光技术、发光二极管照明技术及国防科技领域等有着广泛的应用,同时对电流源的输出特性提出了较高的要求,而目前国内研制的大功率电流源输出电流精确度及稳定度差,功率较小,频率幅值调节性差,脉冲电流上升时间长,脉宽可调范围小,效率低等缺点。电流源的用途很多,压控电流源因设计简单,调试方便而得到广泛应用[1]。
本文所提出的基于串级PID控制算法的压控大功率电流源,具有输出功率大,可输出多路不同波形电流,且幅值频率可调范围大,脉冲电流上升时间短,脉宽可调范围大等优点,具有较好的通用性,可满足绝大多数技术领域的要求。用户可自由选择或设置期望的电流波形,由控制单元中信号发生模块调用波形数据库中的期望波形数据,经外围电路中的信号调理电路及自动增益控制电路进行调理、放大,由大功率电流发生电路对期望波形进行功率放大后输出。
总体方案设计
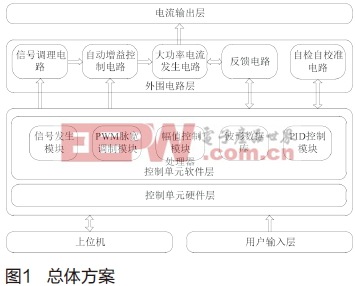
本系统由用户输入层、控制单元硬件层、控制单元软件层、外围电路层、电流输出层、上位机构成,可输出四路不大于20A的脉冲电流、方波电流、正弦波电流、任意波电流,如图1所示。用户可由用户输入层选择或设置期望的波形,由控制单元软件层中信号发生模块调用波形数据库中的期望波形数据,经外围电路层中的信号调理电路及自动增益控制电路进行调理、放大,由大功率电流发生电路对期望波形进行功率放大后输入至电流输出层。用户也可在用户输入层进行设置,对期望波形的频率和幅值进行设置,满足不同用户的需求。本系统拟设计USB/RS232等串口通信模块,方便用户将输出的电流数据及波形输入上位机;用户也可使用外部存储设备(如U盘等)通过USB/RS232接口将波形数据输入至控制单元,这样就可获得任意波形的电流。在外围电路层中采用PID控制电路,并且采用串级PID控制算法,精确控制电流输出,快速调节输出波形的幅值频率,缩短脉冲及方波电流的上升时间。
电流源控制模型的建立
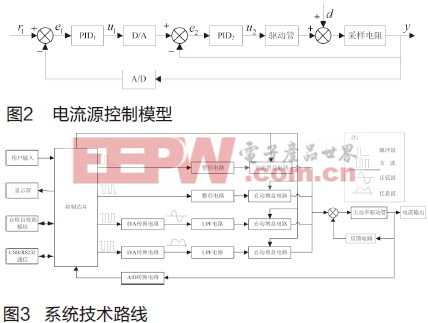
串级PID控制系统[2]是改善控制质量的有效方法之一,在过程控制中得到了广泛的应用。所谓串级控制,就是采用两个PID控制器串联工作,外环PID控制器的输出作为内环PID控制器的设定值,由内环PID控制器的输出去控制执行元件,从而对外环被控量具有更好的控制效果。为了获得高精度、高稳定度的电流输出,设计基于串级PID控制算法的大功率电流源,控制模型如图2所示。
控制模型中有两个PID控制器,PID2为内环控制器,包围PID2的环路称为内环PID控制回路,外环控制器PID1的输出控制量u1作为PID2的外给定值,而PID1处于内给定状态,包围PID1的环路称为外环PID控制回路。
串级PID控制系统的控制顺序是先外环PID控制回路(PID1),后内环PID控制回路(PID2)。控制方式有两种:一种是异步采样控制,即外环PID控制回路的采样控制周期T1是内环PID控制回路采样控制周期T2的整数倍,因为是一般串级控制系统中外环控制对象的响应速度慢、内环控制对象的响应速度快。另一种是同频采样控制,即内外PID控制回路的采样控制周期相同。这时,由于内环回路的受控对象的响应速度较快,应根据内环回路选择采样周期。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码