霍尔速度传感器原理及算法介绍
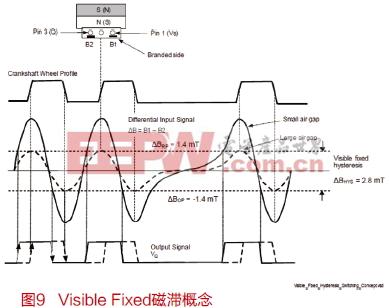
如图9所示为Visible Fixed 磁滞概念,以TLE4924-1 E6547为例,其磁滞算法为Visible Fixed。从图中可以看出其信号切换点在磁滞带上而不是过零点处,又由于是Fixed磁滞,因此其磁滞带为定值(图例磁滞带阈值ΔBHYS为2.8mT)。
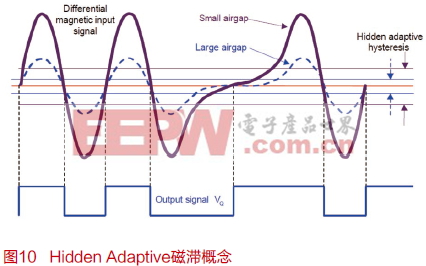
如图10为Hidden Adaptive磁滞概念,以TLE4927C E6547为例,磁滞算法为Hidden Adaptive,其信号切换在过零点处,磁滞带水平动态对应PGA等级。当输入信号幅值超过该PGA等级对应磁滞带时,信号会在过零点处切换。
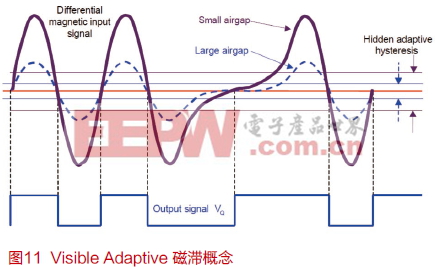
如图11为Visible Adaptive磁滞概念,以TLE4924C-2 E6547为例,磁滞算法为Visible Adaptive,其信号切换在磁滞带上而不是过零点处,而其磁滞带水平动态又对应PGA等级。当输入信号幅值超过该PGA等级对应磁滞带时,输出信号会在该磁滞带上切换。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码