反馈线性化最优控制在单连接机器人上的应用
定理1考虑由系统(2)描述的线性系统关于性能指标(14)的LQR最优控制问题。假设系统完全可观、可控,则系统的LQR最优控制率唯一存在。其表示形式为:
结合式(13)得到系统的最优控制率:

3 控制系统在单连接机器人上的应用
单连接机器人的模型可以表示为:


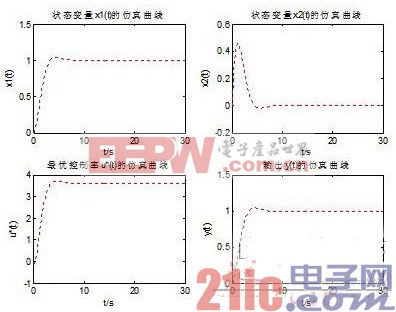
图1 仿真曲线
4 结论
本文针对非线性系统,研究了基于状态反馈精确线性化最优控制器的设计问题,给出了关系度r等于系统阶数n时的非线性系统精确最优控制器的设计方法,最后通过对单连接机器人非线性模型设计基于状态反馈精确线性化的最优控制器,仿真结果表明,本文设计的控制器效果非常好且易于实现。
1
2

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码