一种改进的无线传感器网络节点定位技术
三边测距算法确定未知节点坐标的思想如图2所示。
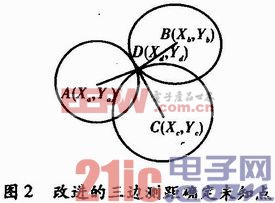
由于三边测距算法基于两条直线的交点来估算未知节点的坐标,未充分利用A,B,C 3个节点的坐标信息,使估算的未知节点的坐标可能存在较大误差。
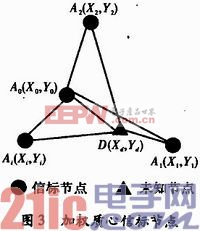
在图3中,根据式(1)~式(3)可解出圆A与圆C的交点Mac1(xac1,yac1)和Mac2(xac2,yac2),圆B与圆C的交点Mbc1(xbc1,ybc1)和Mbc2(xbc2,ybc2);圆A与圆B的交点Mab1(xab1,yab1),Mab2(xab2,yab2)。通过将圆A与圆C交点Mac1(xac1,yac1),Mac2(xac2,yac2)代人式(x-x2)2+(y-y2)2,判断大小即可找出两点距圆B的圆心较近的点,假设为Mac1(xac1,yac1)。同理可找出圆B,圆C交点中距圆A较近的点设为Mbc1(xbc1,ybc1),圆A,圆B交点中距圆C的圆心较近的点设为Mab2(xab1,yab1),依据质心思想估算未知节点D的坐标为
![]()
从上述分析可知,若要对未知节点的定位误差进行补偿首先需要获得信标节点的坐标误差。获得信标节点坐标误差的过程中,由于取不同的3个信标节点做三边定位同样会得到不同的测量值,需要用这些测量值来得到最终的信标节点A0的计算坐标。文中采用加权质心算法来计算信标节点的计算坐标,如图3所示。
假设A01,A02,A03,…,A0n为A0坐标的多个不同测量值;A0’为A01,A02,A03,…,A0n的质心;d1,d2,…,dn为坐标A0到坐标A01,A02,A03,…,A0n的距离。
定义1 信标节点的计算坐标

为加权因子,表示坐标Aoi的权重,离质心A0’的距离越近,所占的权重则越大;xi为Aoi的X坐标值,yi为Aoi的Y坐标值所以信标节点的坐标误差为
![]()
式中,x为信标节点X坐标实际值;xc为信标节点计算坐标X值;y为信标节点Y坐标实际值;yc为信标节点计算坐标Y值。信标节点的坐标误差反映了系统针对该节点附近区域的定位能力。
然而在定位系统实际应用过程中,未知节点B未必恰好处于某个信标节点附近,而可能离各个信标节点距离相当,因此并不能按照理想情况直接用A0的坐标误差去补偿未知节点B的坐标误差。但是,每个信标节点所在区域的定位误差都可以通过信标节点坐标误差来反映,综合考虑所有信标节点坐标误差就可得到由信标节点所构成的区域定位误差,只要未知节点B处于该区域内,其坐标误差就可以用该误差进行补偿。这里的区域大小需根据网络不同的精度要求和节点密度来具体设定。如图2所示,当未知节点B处于由信标节点A1,A2,…,Ai构成的区域时,先通过RSSI值计算出这些信标节点和自身的距离,然后综合各个信标节点的的坐标误差可得出未知节点所在区域的定位误差。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码