基于机器视觉的物体包装盒实时贴标系统设计
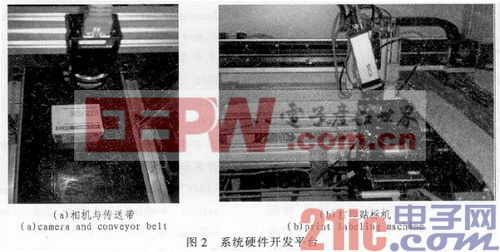
3 系统硬件平台
贴标系统硬件平台主要由光电传感器、工业相机、传送带、工业PC、开关电源、打印贴标模块和检测模块等组成,系统硬件开发平台如图2所示。光电传感器主要用来给出一个3.3~12 V高电平信号触发工业相机进行目标物图像的实时获取;MV-VEM系列千兆网络相机采用帧曝CCD作为传感器,能输出高质量,颜色还原性好的图像,并以网络作为输出,将获取到的图像数据输送至工业PC;打印贴标模块主要由打印机和贴标机两部分组成,打印机主要用来打印特定标签,贴标机负责将标签贴在目标物指定位置;检测模块用来最终检测贴好的标签是否符合要求以及扫描出相应标签的条形码或者二维码。工业PC是该贴标系统的核心,用来实现系统中指令的发送、数据的采集与处理和测试结果的显示等。
4 系统软件设计
该贴标系统的软件采用MFC和OpenCV编程。OpenCV(Open Source Computer Vision Library)是由Intel公司资助的开源计算机视觉库。它由一系列C函数和少量CH类所组成,实现图像处理和计算机视觉方面的很多通用算法,例如特征检测与跟踪、运动分析、目标分割与识别以及3D重建等,是近年来比较流行的图像处理数据库。系统软件设计的结构图如图3所示。
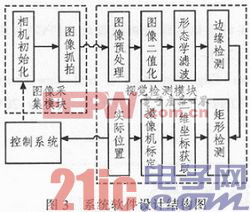
在软件设计中,图像采集模块主要是采用西安维视公司生产的MV-VEM120C型号的千兆网络工业相机,该相机具有高分辨率、高精度、高清晰度、色彩还原性好、低噪声等优点,能够满足工业级图像处理要求,通过调用该相机的API,实现对目标物图像数据的采集。视觉检测模块主要用来对获取到的图像信息进行实时处理,处理流程主要有以下几步:首先通过图像灰度化、图像分割等一系列图像预处理,生成二值图像。然后利用形态学处理去除二值图像噪声。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码