亚像素边缘检测在小模数齿轮参数检测中的应用
三次样条插值
改进的Sobel算子检测得出的是像素级的边缘,为了获得亚像素级的边缘,就要对边缘图像再进行精提取。考虑到要满足在线检测的要求,检测速度要越快越好,本文采取处理速度相对较快的对灰度边缘图内插处理方法。插值方法中,三次样条插值法得到精度高,所以本文采用三次样条插值法对灰度边缘图进行插值处理。
三次样条插值定义[4]如下:
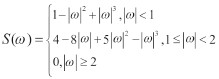
若函数S(x)满足:(1)S(x)在每一个子区间[xi-1,xi] (i=1,2,…n)上都是不高于三次的多项式,其中![]()
![]()
(2)S(x),S′(x),S″(x)在[a,b]上连续。
(3)满足插值条件S(xi)=f(xi) (i=0,1,…,n),那我们就称S(x)为函数f(x)关于节点x0,x1,…,xn的三次样条插值函数。其数学表达式如下
 (2)
(2)
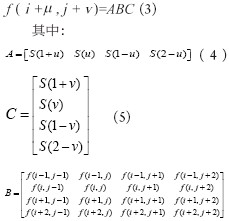
具体的实现方法是考虑一个浮点坐标(i+μ,j+v)周围的十六个邻点,目标像素点c的值![]() 可通过以下的插值公式得到:
可通过以下的插值公式得到:
 (6)
(6)
最大类间方差法(Ostu)
对插值得到的图像再进行二值化,就可得到图像边缘信息,其中阈值的选择是关键。这里采用最大类间方差法来自动产生阈值。该方法具有简单、处理速度特别快的优点,是一种常用的阈值选取方法。其基本思想是:假设图像像素数为N,灰度变化范围为[0,L-1],对应灰度级i的像素数Ni为几率为:
![]()
![]()
以阈值T为基准,把图像的像素按灰度值划分为两类C0及C1,其中C0的灰度值低于T,即在[0,T]之间的像素组成;其中C1的灰度值低于T,即在[T+1,L-1]之间的像素组成。
考虑到像素灰度的分布几率,整幅图像的均值为:


加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码