基于瑞萨单片机自动寻迹智能车的设计
2.4 电机驱动模块
电机驱动板为一个由分立元件制作的可逆双极型桥式驱动器,其功率元件由4支n沟道功率MOSFET管组成,大幅提高了电动机的工作转矩和转速。该驱动器主要由以下部分组成:PWM信号输入接口、逻辑换向电路、死区控制电路、电源电路、上桥臂功率MOSFET管栅极驱动电压泵升电路、功率MOSFET管栅极驱动电路、桥式功率驱动电路、缓冲保护电路等。通过设置HS/3048F输出的PWM波的盼占空比可以实现控制电机正反转。当输出的占空比为50%时,电机不转,当占空比>50%时,电机正转;50%则反转。
2.5 测速模块
为提高检测精度,本模块最后确定为使用精度较高的光电编码器。光电编码器使用5 V电源,输出方波信号,具有质量轻、可靠性高、安装简单等优点。
3 算法及软件设计
3.1 方向控制算法
智能车方向的控制采用对预定轨道的闭环控制,即输出方向和测得的白线位置成分段比例关系。舵机的转角公式为
θ=arctan(e/b) (1)
式(1)中,θ为舵机的转角;e为偏移量;b为前轴到传感器间距。
通过实验可得舵机的转角与PWM脉宽呈线性关系,转向公式为
PWM=θ×K+M (2)
式中,K为比例系数;M对应于舵机位没有发生偏转时的PWM控制脉宽。实验证明,在一定范围调节K,可以起到良好的控制效果。
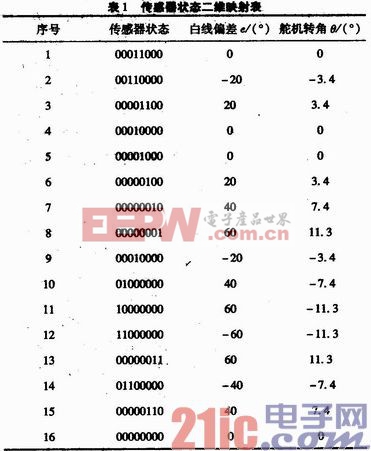
智能车检测到的路面情况有16种状态,其中每种状态都有一个舵机转角与之对应。这样就可以在程序中创建出每种传感器状态中对应的白线偏差e与舵机转角θ之间的关系,如表1所示。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码