一种三相四桥臂空间矢量脉宽调制方法
摘要:空间矢量脉宽调制(SVPWM)具有直流电压利用率高和输出电压谐波含量少的优点,但现有的应用于三相四桥臂逆变器的三维(3D)SVPWM算法存在计算过程复杂且计算量大的缺点。通过分析传统二维(2D)SVPWM算法输出调制波的直流分量,提出一种新的3D-SVPWM简化算法。该算法将三相电压参考分为交流分量和直流分量两部分,交流分量用来计算三相调制波及其调制波直流分量,直流分量用来计算第四桥臂的调制波。该算法具有过程简单、计算量小的优点。实验结果证明了该算法的正确性和有效性。
关键词:逆变器;空间矢量脉宽调制;三相四桥臂;不平衡负载
1 引言
三相四桥臂逆变器具有直流电压利用率高、直流输入电容小、带不平衡负载能力强的优点。其调制算法中,3D-SVPWM算法具有直流电压利用率高、输出谐波含量少的优点。现有的3D-SVPWM算法主要有两种,一种是基于α,β,γ坐标系的调制方法,需要进行坐标变换,过程复杂且计算量大;另一种是基于a,b,c坐标系的调制方法,虽然相对于前一种算法计算过程有所简化且计算量有所减少,但仍需将电压空间进行复杂的分区和大量计算。此处通过分析传统2D-SVPWM算法输出的调制波,提出了一种新的适用于三相四桥臂逆变器的3D-SVPWM简化算法,该算法具有过程简洁、计算量小的优点。
2 3D-SVPWM简化算法
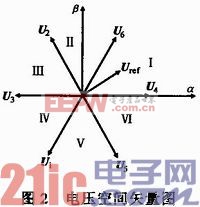
在传统的基于α,β,γ坐标系和基于a,b,c坐标系的SVPWM算法中,电压空间被分割成24个四面体,首先判断参考电压矢量所在的四面体,然后根据空间合成理论计算各个矢量的作用时间,进而计算出每相桥臂的作用时间和占空比。此处提出的简化算法既无需进行坐标变换和上述判断,又无需矢量合成计算,计算量大大减少。
图1示出三相四桥臂逆变器拓扑图。

图中,ua,ub,uc,un和uf的参考点为直流电压中点O;uan,ubn和ucn的参考点为交流输出中点n。为提高直流电压利用率和降低输出谐波含量,a,b,c相桥臂采用传统的2D-SVPWM算法。
为便于分析和计算,将电压参考分为交流分量和直流分量两部分,即:

下面按照2D-SVPWM算法分析调制波直流分量,将参考电压从三相静止a,b,c坐标系变换到α,β,O坐标系,变换公式为:
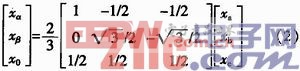
由式(1),(2)可见,uαref和uβref只与电压参考的交流分量有关,u0ref只与电压参考的直流分量有关。传统2D-SVPWM中只有uαref和uβref参与计算且不能控制直流分量电压,所以需知道a,b,c相桥臂调制波的直流分量,从而通过调节第四桥臂调制波输出参考电压的直流分量。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
