航标遥测系统研究
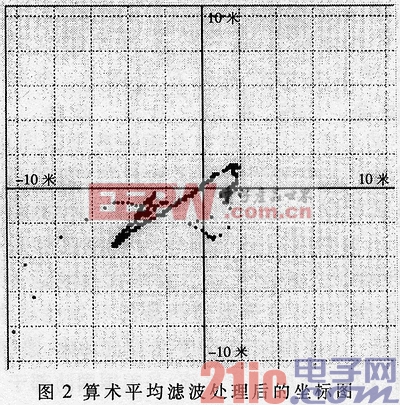
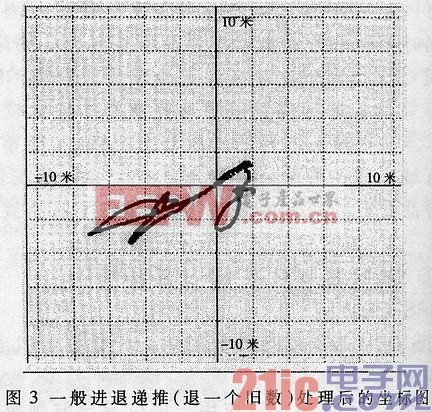
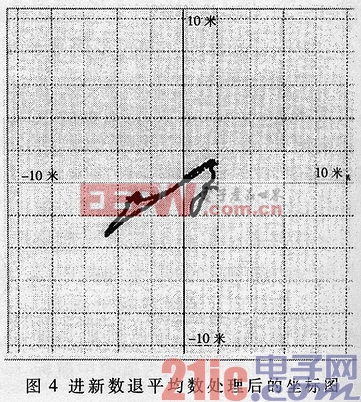
图2、图3、图4分别是对利用Visual Basic6.0开发的数据采集与处理程序采集的10小时GPS数据进行几种数据处理后的坐标示意图(其中,横坐标、纵坐标分别表示经、纬度)。从这三个图中可以看出,从图2到图4,数据收敛性依次增强,可见综合几种滤波法于数据处理中,将大大减少误差,提高系统精度。
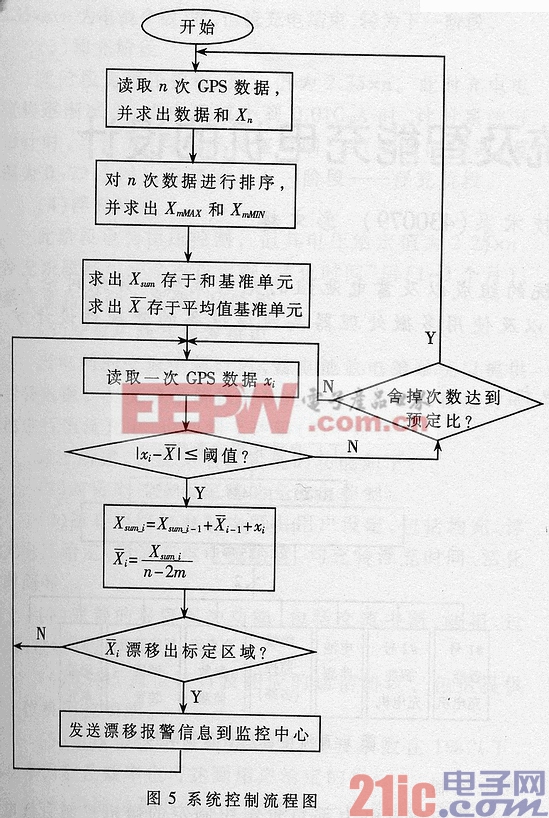
2.3 控制流程
系统控制流程图如图5所示。
本文通过大量的实验与测量观察,深究了GPS OEM板的误差来源及规律,并采取了相应的数值处理方法及控制策略,大大提高了GPS OEM板在遥测系统中的应用价值和可靠性,保证了航道维护中标灯的位置遥测监控的准确性与安全性,是GPS OEM板—个很有意义的应用实例.
1
2

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码

