基于MSP430的声音定位系统的设计
(3)后级放大模块设计
滤波之后的信号噪声幅度在20 mV以下,为了便于比较器门限的设定,再跟一级放大以提高比较信号两相邻脉冲幅度之差,这有利于系统的稳定丁作。选用高CMRR运放OPA602。
(4)比较整形模块设计
为了能对滤波输出声音信号进行处理,需要将模拟信号整形成能被单片机识别的TTL脉冲信号。采用比较器LM311实现对输出信号的整形,得到的信号接到MSP430扩展的中断口上,以实现对时间差的测量。
(5)无线发射模块设计
本系统采用无线收发模块RF24L01进行误差信号的传输。该芯片1.9~3.6 V供电,功耗小。其内置2.4GHz天线,并采用高效的GFSK调制,抗干扰能力强。这款芯片制成了PCB板,内置专门的稳压电路,使其在各类的电源供电情况下,都有很好的通信效果。该模块可以通过软件设置地址,只有收到本机地址时才会输出数据,可直接与各种单片机连接使用,软件编程十分方便。
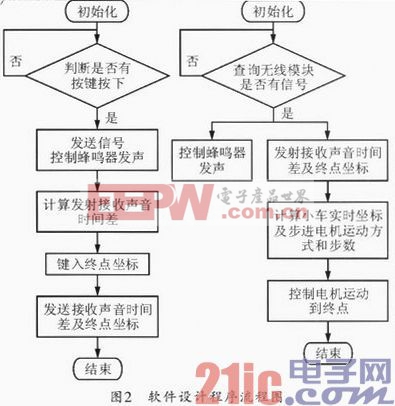
3 系统软件设计
声源引导部分的软件设计包括对可移动声源发声命令的发送,时间差信号的接收与处理,载体小车上电机控制命令的发送以及无线发射模块的控制。可移动声源部分的单片机主要完成对无线接收模块上寄存器的查询,得到声源引导部分发出的数据命令,并对可移动声源部分的蜂鸣器和步进电机进行控制。软件设计流程如图2所示。
4 系统测试及分析
本系统设计制作一声音定位系统,小车作为声源载体可以移动。A,B两个麦克风之间距离固定为1 m,小车起始位置为直线AB上方平面的任意点,但须保证车头方向与AB中垂线Ox垂直。键盘输入目的坐标点,小车应能精确快速到达指定点。
4.1 测试数据
数据如表1所示。

4.2 测试结果分析
从测得数据来看,精确度比较可靠,测得坐标误差最大为0.8 mm,控制小车运动到指定位置的误差最大为1.0 cm,这可能是由于小车在启动和转弯过程中带来的,也可能是由于前面测坐标的误差放大带来的。
1
2

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码