简易智能电动车的设计
3 系统软件设计
系统软件设计采用C语言对单片机进行编程实现各项功能。
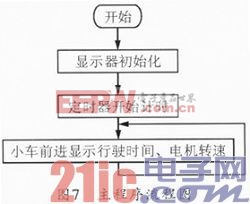
程序是在WIN XP环境下采用IAR Embedded Workbench软件编写。可以实现小车对传感器的查询,电机的控制,液晶显示等功能。主程序流程图如图7所示。
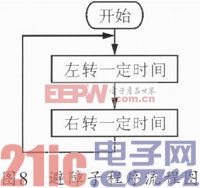
红外探测障碍物时,当没有感应到障碍物时红外传感器为单片机提供高电平,当传感器感应到障碍物时红外传感器为单片机提供低电平,并产生一个下降沿提供给单片机触发中断,从而调用中断子程序。当检测到障碍物时,控制小车左转一定时间后,再右转一定时间,再次判断前方是否有障碍物,直到没有障碍物的信号。避障子程序流程如图8所示。其它子程序包括:显示子程序、延时子程序、路程测量子程序等。
4 系统测试
为了确定系统符合要求,我们对系统中关键部分进行了实际的测试。
(1)测试使用的仪器
测试中所使用的仪器仪表等设备如表2所示。

(2)指标测试和测试结果
①光电检测部分测试
红外发射管的电流在5~20 mA之间,电流大,发射的红外线强,但杂散反射光分量多,不易调整,检测误差大;电流小,工作可靠,检测头相对被检测的物体的距离范围窄,对于宽度为5 cm的黑色条纹,电流在10 mA左有就可以了。将检测头对准在白纸上,适当靠近或拉开与白纸间的距离,调整电位器,使得反向器输出为一个高电平。在用一张画有黑白相间条纹的划过检测头,用示波器观察波形是否在高、低电平中跳变。若没有此现象,可慢慢调整电位器,直到满意为止。
②前轮测试
前轮驱动电路直接用稳压可调直流电源供电,用外加信号触发,观看电机转速以及测量电机两端的电压。电机状态见表3所示。

由此表可看出,电机在正常行驶下不动作,在小车偏离轨道时电机发生了相应的转动,同时电机在动作时的电流达到一定的强度,使轮子能偏转到比较大的角度。
③系统实现的功能:躲避障碍物;自动测速。
5 结束语
本系统以MSP430单片机为核心部件,利用红外测障并配合一套独特的软件算法实现了小车的方向速度控制、躲避障碍物、时间显示等功能,最终使小车完成要求的各项任务。在系统设计中,力求硬件线路简单,并充分发挥软件编程方便灵活的特点,来满足系统设计要求。因为时间有限,该系统还有许多值得改进的地方:红外线有一定的缺陷,在光线较强的环境下输出的高低电平不稳定,因此,可以在光电管上加上固定管以减少与外界环境的接触。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码