基于滑模控制的TSMC-PMSM调速系统
在滑模面以外的运动中,系统运动点呈指数方式向滑模面运动,当接近滑模面时,系统进入切换带,穿越滑模面的运动与误差的绝对值|e|成比例,则幅值会越来越小,理想情况下最终会稳定到原点,误差为零,导致抖振的滑模切换项sgn(S)消失,抖振消除:
控制律中重要且关键的是B的求逆,由于系统开始运行时无法保证B的奇异性,会出现求不出其逆矩阵的情况。解决方法是每次求逆前先判断矩阵的奇异性,满足非奇异条件时求逆,不满足时则保持上一次的运算结果。
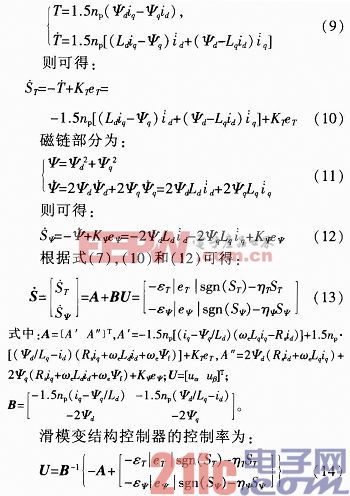
4 滑模变指数TSMC-PMSM调速系统
图1为TSMC-PMSM调速系统原理框图。采用DTC策略,转矩和磁链采用上述设计的控制器,转速外环采用PI控制器。内环控制器的输出ud,uq经2r/3s变换得ua,ub,uc,它们作为TSMC逆变级调制策略的参考给定,通过TSMC调制产生驱动PMSM定子侧三相电压。
TSMC整流级采用PWM,逆变级采用SVM:
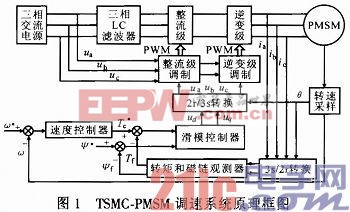
(1)整流级PWM 为保持在中间直流上正下负的同时,尽可能充分地利用三相输入线电压,以合成较大的直流电压,将三相正弦输入相电压ua,ub,uc划分为6个区间。图2为整流级分区。
以1扇区为例,在一个调制周期内保持ub持续导通。ua,uc占空比为:
D1=ua/(-ub),D2=uc/(-ub) (15)
类似容易得到其他区段的占空比计算公式。
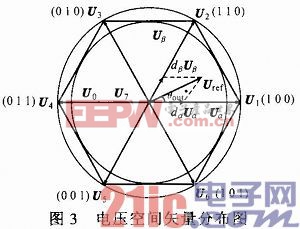
(2)逆变级SVM 逆变级采用SVM技术,电压空间矢量分布图如图3所示,平面被分为6个区间。假定参考空间矢量Uref位于区间1,Dm,Dn,Do分别为U1,U2和零矢量的占空比。对于TSMC,由于整流级与逆变级没有大电容连接,为了与整流级协调以满足零电流换流,通常逆变级分为两段调制,占空比为:
![]()
5 系统设计及实验
TSMC驱动系统的全数字化实现得益于现代微处理器,特别是专用DSP及全控型功率器件,尤其是智能功率模块(IPM)的问世。系统硬件部分主要由控制板、TSMC主电路和驱动电路及为驱动电路供电的电源、电压电流采样电路及光电编码盘速度和位置检测部分、滤波电路、保护电路、PMSM等组成。
控制电路主要由TMS320F28335型DSP和EP2C8T144C8N型FPGA组成,其中FPGA主要根据TSMC整流级和逆变级的调制时间(占空比乘以调制周期)产生TSMC的驱动脉冲,即完成了TSMC的调制,同时FPGA还负责TSMC的保护功能;而基于滑模变结构的PMSM的DTC算法及TSMC占空比计算则由DSP完成,同时DSP还负责与上位机进行串口通信。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码






