基于反馈控制的恒流型电子负载系统
2.2 电流反馈系数β的确定
也就是霍尔电流传感器转换系数的确定。设计中用到的电流传感器为霍尔传感器,输入为电流,输出为电压,经测试确定霍尔系数K = 0. 8 V/ A,即当传感器的输入端电流为1 A时,输出端的电压为0.8V.β= K = 0. 8 V/A
2.3 PI调节器静态放大系数KP的确定
根据负反馈闭环控制原理有: K =βKP KS = 1 得:KP = 1/ βKS△0. 875V/A.根据此值,选取调节器输入、输出电阻值,以满足RF/RI = KP.
2.4 各电压极性的确定和控制原理简述
各电压极性一般是由后向前推得, MOS管的控制电压UG为正( + ) ,也就要求PI调节器的输出为正( + ) ,又考虑到霍尔电流传感器的输出始终为正( + ) ,为了构成负反馈控制,则PI调节器的给定电压应为负( - )。所以PI调节器采用负相输入,由前一级的倒相器将由电位器W产生的可调正电压变为可调的负电压,作为恒流设定值加在调节器的输入极,与由霍尔电流传感器提供的电流反馈电压进行比较,根据偏差量和正负极性由PI调节器实现比例积分调节,以实现电流( I O )恒定。改变积分电容的大小,以满足响应快速性和稳定性要求。
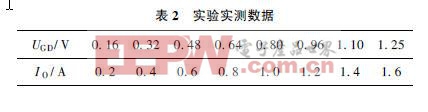
3 实验研究结果
表2是实验实测数据,从数据规律看, UGD (电位器W)和MOS管漏、源极电流IO成较好的线性关系。且IO / UGD= 1/ β= 1/ 0. 8= 1. 25.实验中的调节响应的快速性和抗扰性能都能调为最佳。
4 几点说明和改进措施
(1)由于采用了PI调节器, MOS管的死区不必专门设计电路来消除, MOS管的非线性在闭环内自行消除。
(2)根据被测设备的性质(阻性,感性,容性) ,总可以通过调节PI参数,以保证其快速性,稳定性和抗扰性要求。
(3)该系统具有很强的可扩展性能。可实现数字给定和调节控制。
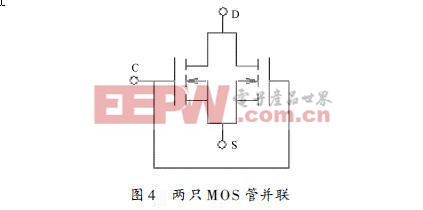
(4)对于要求测试电流较大时,可以考虑用多只MOS管的并联组合来扩大负载容量,如图4所示为2只MOS管的并联组合,在此情形下,K`S= mKS; K`P = KP/m,m为所并MOS管的个数。
(5)当扩容后,需要考虑增加MOS管驱动电路。
(6)此电路中没有耗能元件,所有的负载功率消耗仅由环路内元件承担,主要是MOS管自耗。受MOS管自身的功耗性能限制,允许流过的电流不可能太大,即使采用并联电路等扩容措施。所以正常使用时要充分考虑MOS管的散热。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码


