大功率永磁低速同步电机的无传感器控制
2.2 转子位置及速度估算
由d,q坐标系下得到的,并没有包含转子速度及位置信息。因此为得到所需信号,需考虑电机的电动势在d,q坐标系下的特点进行转速及位置估计。
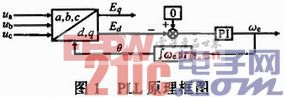
由于PLL是一种自适应闭环系统,故能实时跟踪三相对称电源的频率与相位。在此根据PLL的特性及工作原理,设计了基于PLL的转子位置/速度估计算法,其算法原理如图1所示,其中PI调节器的参数可参考文献设计。
3 实验研究
将无传感器控制算法用于2 MW PMSM控制实验平台。该平台包含兆瓦级PMSM系统和变流器系统,其中电机系统采用PMSM对拖永磁同步发电机模拟直驱式风力发电实验平台。电机参数:额定功率P=2 MW,额定电压U=690 V,额定转速nr=17 r·min-1,定子电阻R=0.019 2 Ω,直轴电感Ld=0.004 H,交轴电感Lq=0.005 H,极对数np=30。
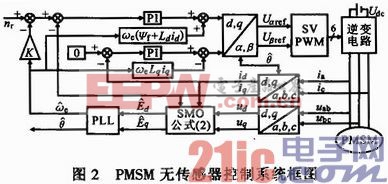
由式(1)可见,d,q轴分量相互耦合,采用前馈解耦控制策略,结合所提控制算法,可得图2所示无传感器控制系统框图,其中![]() ,K=1/π。在此基于以RT-Lab软硬件平台为基础的实时仿真系统,在Matlab下搭建该控制算法的系统仿真模型,然后将搭建好的仿真模型下载到RT-Lab实时仿真系统,经转接板实现与变频器之间的通信。
,K=1/π。在此基于以RT-Lab软硬件平台为基础的实时仿真系统,在Matlab下搭建该控制算法的系统仿真模型,然后将搭建好的仿真模型下载到RT-Lab实时仿真系统,经转接板实现与变频器之间的通信。
当有传感器时,转子位置可测出,电机每次都可平稳启动;而在无位置系统中,启动时并不知道转子位置,若转子位置与定子轴线之间角度过大,会导致电流过大或启动失败。由于电机没有安装速度及位置传感器,整个实验过程采用开环启动:①电机启动时采用常规V/F控制方法,当运行到1 Hz(2 r·min-1)时,待电机稳定运行一段时间后切换到无传感器控制算法;②由于电机没有安装位置/速度传感器,将开环启动时给定的频率换算出转子位置角,并将其作为参考位置角,让无传感器控制算法实时估计、跟踪。当估计位置角跟踪上参考位置时,系统会自动切换到无传感器控制。
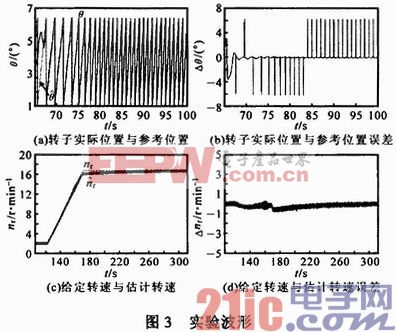
图3a,b为转子估计值和参考值之间的变化曲线,由于启动时电流和电压不稳定,转子估计值未较好地估计到实际位置,随着电机的平稳运行,转子位置慢慢跟踪上参考位置,且跟踪误差也慢慢减小,实验结果表明,该算法具有较好的位置估计和跟踪能力。图3c,d为电机实际运行过程中跟踪给定转速和转速误差的变化曲线,当电机稳定运行在2 r·min-1后,系统切换到无传感器控制算法。当给定值设为17r·min-1时,电机能快速跟踪设定转速,且转速波动也较小(0.5 r·min-1)。可见,该控制算法是有效、可行的。
4 结论
在此基于滑模观测器鲁棒性强、设计简单的优点,同时结合锁相环跟踪三相对称电源的频率与相位的特性,构建了一种永磁低速同步电机无传感器控制系统。通过实验证明了该控制算法在不同给定转速下都可较真实地反映出转子的转速和位置,且其在低速运行过程中具有较好的稳定性和可行性。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码





