一种简易GPS定向仪的实现
当船体运动时,由于主GPS 设备与从GPS 设备都可以得到各自的速度大小及方向,所以可以求出船体的运动状态,如图2 所示,由于GPS 设备可以获取A 点及B 点的瞬时速度及方向,而船体可以视为刚体,则可以得到与真北方向或者磁北方向的夹角α、β(可以选择真北也可以选择磁北,不过A、B两点要统一),将角度与方向分解在北向和东向上,叠加解算后即可得到船体的运动状态:
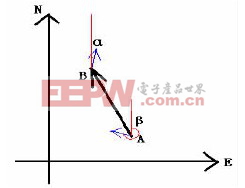
图2 船体运动状态的计算
3 GPS定向仪的实现
如图3 所示,GPS 定向仪由GPS 卫星信号接收天线、天线连接电缆、GPSOEM板卡、单片机组成,其中供电电源为12VDC 蓄电池:

图3 GPS定向仪硬件组成
其电路原理如图4 所示:
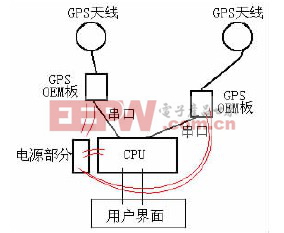
图4 电路原理
其中,A、B 两个GPS 设备把数据输出到CPU,CPU 通过软件计算出当前的姿态后实时的通过用户界面显示给用户。
4 结论
本文中讨论的简易GPS 定向仪,不需要使用专业GPS 设备,而通过简单易行的方法和解算即可得到载体的运动状态,当主从GPS 设备间的距离大于1 米后,精度会随着它们之间距离的增加而有所提高。事实上,这个方法如果将GPS 设备升级为带有载波相位输出的专业GPS 测量设备,并且将主从GPS 设备间的距离作为已知条件进行静态高精度基线解算的话,可以把定向仪的精度明显的提升到专业设备的水准,与目前市面上的专业定向、定姿态设备的原理是相同的。
1
2

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码