Cyber15队智能汽车竞赛技术报告(节选)
目标是达到图5效果。红色为卡尔曼滤波输出,蓝色为加速度计直接输出。如果红色抖动非常厉害,可以适当减小Kg的大小。接着是动态整定,还是保持车轮恒定PWM旋转,同时,摇摆车身。
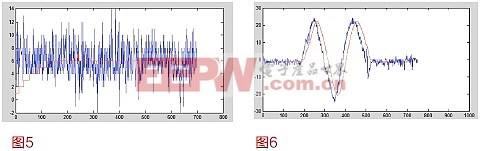
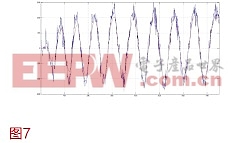
大致调节到图6所示的样子。目前存在一个相位差,这个相位差在后期直立算法的调试中是致命的,必须克服掉。解决方法,逐渐增加dt即可。达到图7效果即可认为卡尔曼滤波参数整定完成。
电磁支架设计
在智能车设计中,越早获取赛道信息就能够更早作出判断,并对车模实施控制。对于摄像头组而言,获取的赛道信息多,但是对于电磁探头而言,基本只能获得探头正下方和前方部分信息。那么要越早获取前方赛道信息,最直接有效的方法就是加长前瞻。
同时,针对两轮车而言,长前瞻容易带来如下几个问题。
1、增加重量:支架的重量将直接影响直立的效果以及两轮车的动态性能。尤其当前瞻较远的时候,前段的增重将造成力矩的增加,且前瞻越远,增加的力矩也就更明显,对于车模的直立影响将更大。
2、增加转向惯量:过于长的前瞻将使得Z方向的转动惯量增加,由于电机功率有限,转动惯量的增加将造成转向上不灵活的情况,影响弯道性能。

3、信号串扰:根据比赛规定,两条电磁线间最小间距为60CM,如果前瞻过长,有可能探头支架申入临近赛道,被临近信号干扰,造成窜道的情况。
4、过于压线:当使用跟线的弯道算法时,过长的前瞻容易致使一个轮子掉落跑道,如下图。

根据实际测验得,前瞻在40CM-60CM之间,效果最好,因此最后选取前瞻为50CM。
参考文献
[1]冯智勇,曾瀚,张力,赵亦欣,黄伟.基于陀螺仪及加速度计信号融合的姿态角度测量[J].西南师范大学学报,2011,36(4):137-141
[2]陆芳,刘俊.卡尔曼滤波在陀螺仪随机漂移中的应用[J]. 微计算机信息,2007,23(8-2):222-224
[3]陈静.两轮自平衡机器人模型及控制方法研究[D].北京工业大学硕士学位论文,2008.
[4]Rich Chi Ooi.Balancing a Two-Wheeled Autonomous Robot[D].The University of Western Australia Final Year Thesis,2003.
[5]Gene F.Franklin,J.David Powell,Michael L.Workman.Digital Control of Dynamic Systems[M].北京:清华大学出社,2011.

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码