基于DM6446处理器的视频运动车辆检测系统的实现
经形态学滤波处理后,二值图的视频运动车辆区域有了较好的空域连通性,采用区域生长法进行定位的目的就是要确定出前景目标区域并给予标记。本文对前景区域采用矩形框进行标记:在四邻域连通区域内寻找坐标的最大值max(x,y)和最小值min(x,y),据此在图像中绘制白色直线段并连接成矩形框。区域生长法目标定位可简单总结为以下4 个步骤[4]:
① 将标记矩阵C(x,y,tk)初始化为待标记的二值图像(设种子点灰度值为255);② 根据种子点灰度值逐行扫描C(x,y, tk)图像,若搜索到符合条件的像素点则以其为中心检查邻域像素,满足合并条件的邻域像素坐标压入堆栈,并设置为背景点;③ 利用步骤②的前景点位置坐标得到目标矩形框位置坐标(xman,yman)、(xmax,ymax),矩形框坐标入栈,返回②;④ 逐个取出矩形框位置坐标,进行矩形框绘制。
4 实验结果与分析
为进一步说明本文基于DM6446 实时视频运动车辆检测系统的实际检测效果,本文针对不同交通视频序列进行了检测实验。由于不便在实际交通现场进行效果测试,实验时使用"新浪S008"DVD 机提供视频输入信号,DVD 机播放指定的交通视频序列。DVD 的输出通过AV 线连接到视频板的复合视频信号接口,处理结果由连接在VGA 口的液晶显示器显示。本文共用到3组视频序列: Highway 、Video.long.mjpg 和Hzhighway.其中Highway 来自http://cvrr.ucsd.
edu/aton/testbed/,video. long.mjpg 为刘瑞祯编写的《OpenCV 教程:基础篇》光盘所提供的测试序列,Hzhighway 为自拍视频序列。
图4(a)~(d)示意了在DM6446 上进行视频运动目标检测的处理流程。图5(a)、(b)和(c)分别给出了对Highway、Video.long.mjpg 及Hzhighway 各视频测试序列的运动车辆进行检测的效果。
Highway 背景较为简单,车辆都处于运动状态且行进方向与摄像机镜头朝向相同,检测效果较好,虽然存在少量连体问题,但基本定位准确,如图5(a)所示,可以看到白色矩形框将车辆包含在其中,并随着车辆远离摄像机而逐渐缩小。
Video.long.mjpg 取景范围较小,同时车辆行驶速度较快,有时不能完整框住车辆。在自拍序列Hzhighway 中车辆定位准确但有时存在矩形框不能框住单一车辆和大小不稳定的情况,如图5(c)所示。经过综合分析得到如下结论:① 倘若背景更新速度不够快,易导致当停驶车辆变为背景后又恢复运动状态时背景不能及时更新为路面的情况。②有些车辆车体颜色与路面相近,在更新时部分车体会被误当成背景。
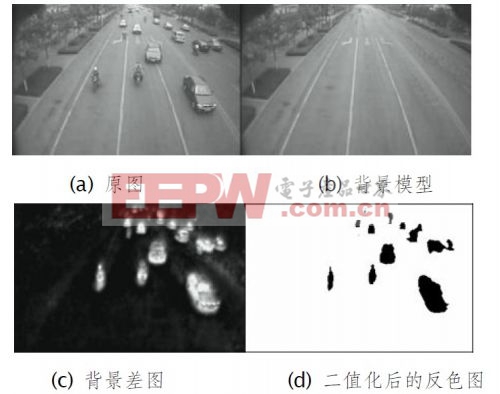
图4 视频运动车辆检测过程示意图
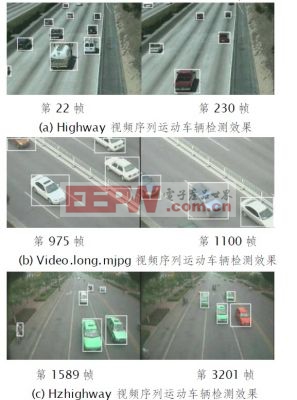
图5 DM6446 视频运动车辆检测系统实验测试效果图。
5 结语
本文给出了一种基于DM6446 的视频运动车辆检测系统的技术实现方案,描述了系统软硬件平台的搭建思路。本文所给出的实验效果说明了本系统的技术可行性及其良好检测性能。虽然本系统在几组视频测试序列中获得良好的检测效果,但本系统对环境光照的突变、树枝摇摆的干扰等仍缺乏适应性,算法需做进一步考虑,同时程序也需针对DM6446 硬件平台做进一步优化,这也是作者进一步的研究工作。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码