基于视觉处理的高级驾驶员辅助系统实现
系统级最佳性能
ADSP-BF60x将具有五项功能的系统的总体成本降低了30%。ADSP-BF609(可处理高达百万像素格式)和ADSP-BF608(可处理高达VGA格式)支持高达五种并行视觉功能,每秒可处理高达30帧。ADSP-BF60x在105℃环境温度下的功耗不足1.3W,具有同类产品的最低功耗。
为了实现这一功耗,ADI公司采用了直接又特别的概念。这一概念基于两个Blackfin内核,因为已量产的ADAS系统正采用这一架构。然而,那些无法经济高效地在软件中模型化的算法已经采用硬件引擎实现,由此产生了高度可配置的视觉处理单元工具箱。ADI公司将其称作“流水线视觉处理单元”(PVP),如今它已成为全新ADSP-BF60x处理器的一部分。虽然采用了低功耗处理技术,但还需要以进一步创新来解决现代设计中最重要的功耗问题:外部存储器(DDR)接口。通过适当分配处理能力和合理利用适度的存储器带宽,可以实现最低功耗。此外,一些硬件模块也增强了Blackfin架构,使其能够满足功能安全要求。
有效数据流
许多芯片架构都从视频传感器接收数据,并将其逐帧保存至外部存储器(如DDR)以供逐帧回读(略有延迟)。多核架构甚至还趋向于大幅加快数据移动,目的只是为了使内核能够识别每一帧感兴趣区域(ROI)。ADSP-BF60x概念避免了视频数据的这种功耗传输。全帧依然存储在DDR2存储器中,但无需回读整帧。输入数据一被器件接收后,就会多点传输至流水线视觉处理单元(PVP),PVP会在数据输入过程中直接对其进行预处理。
如图1所示,PVP摄像头数据流水线可以产生多达三个中间预处理结果,例如边缘图像、积分或通过非线性阈值的重新量化。在上方,它可以提供直方图之类的状态信息。无需在Blackfin内核上执行一条指令,也无需通过DDR总线传输一个字节,就可以实现这些结果。此外,PVP在输出中间结果时还采用了高密度数据格式,因此,结果在大多数时候都存储在片内L1和L2存储器中。
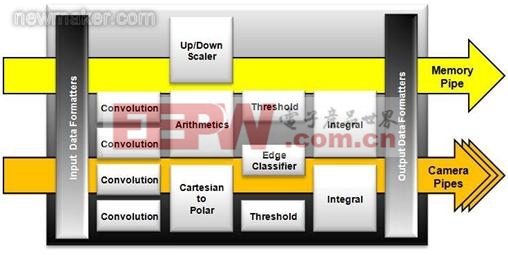
图1:采用ADSP-BF60x处理器的视觉处理
流水线视觉处理单元(PVP)近观
PVP可以处理多达四个数据流、三个摄像头数据流水线和一个存储器数据流水线,此外还可以计算直方图状态输出。如图2所示,PVP工具箱包括12个处理块,均针对各种视觉处理步骤进行了优化。
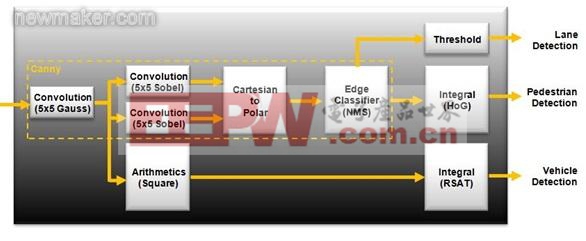
图2:流水线视觉处理单元(PVP)

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
