微弱GPS信号差分快速捕获算法
2.2 累积算法性能对比
由于3种累积方式的不同特性,在低信噪比环境下,单独的使用一种累积方式,很难获得理想的捕获性能。为了平衡算法效率与信号捕获效果,通常是将相干累积与另外两种累积算法结合使用,或在基本的累积算法基础上进行改进,以克服其存在不足,使弱信号累积算法具有更好的性能。
在改善检测统计量信噪比方面,相干累积的效果是最好的,差分相干累积捕获算法其次,非相干累积最差。因为相干累积时信号功率呈平方倍增长,噪声功率仅是线性增长,使得信噪比线性提高;差分相关捕获算法对相邻相干累积值的共轭相乘再累积会使信号部分增强,但信号和噪声的交叉乘积项成为新的噪声,它对信噪比的改善不及相干累积;而非相干累积把信号和噪声作平方处理再累积,由于平方损失
(squaring loss)噪声部分被放大,对信噪比的改善效果最差。若在低信噪比环境下应用非相干累积算法,要么检测性能很差,要么必须通过大幅增加累积次数来抬高信噪比,这样会延长捕获时间。
在捕获时间方面,相干累积由于sinc(π△fT)中△f的限制,频域搜索的步长较小,频域搜索次数增多,整个搜索时间较长。而差分相关捕获算法和非相干累积算法都在相干累积后进行了第二次累积以提高信噪比,因此,相干累积时间T可设得较短,△f的限制也可相应放宽,频域搜索步长可加长,捕获时间比相干累积算法短。
在实际的算法设计中.都是以1 ms相关结果矩阵为基本单元。然后根据提高处理增益的累积方式,进行累积处理。非相干累积的基础是相干累积,同样差分相干累积的基础也是相干累积。
3 新算法的设计
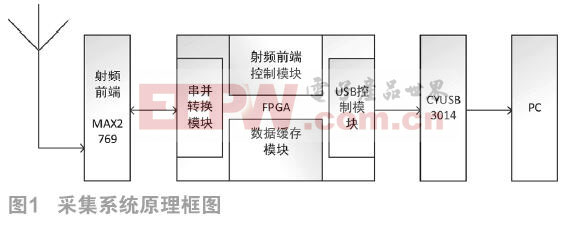
通过对导航电文数据的分析,可发现导航数据编码规则中,通过特殊的运算规则使得在帧同步字之前的交接字的最后两个比特始终为00,来保证接收机收到的帧同步信息始终为10001011,因而在接收数据的帧同步位置可预知的接收比特为0010001011共10的比特。综合考虑算法效率和捕获灵敏度等综合因素,利用导航数据中已知的与帧同步相关的信息和快速相干累积的思想,充分利用差分相关时可快速进行一维搜索的特性,设计算法整体方案如图1所示。
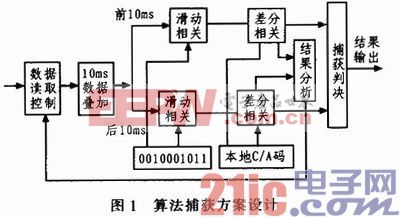
算法的具体实现步骤如下:
1)每次控制读取160 ms的GPS数字中频数据,并进行以10 ms为单位的数据直接叠加;
2)分别将两组叠加数据与本地10比特帧同步信息进行滑动相关,当接收数据当中含有帧同步信息时,相关操作会获得与之相对应的信号处理增益;
3)将上步获得的数据与本地C/A码进行差分相关运算,得到捕获运算结果;
4)分析捕获结果,控制数据读取的位置,从而找到帧同步码提高信号处理增益;
5)输出捕获判决结果。
3.1 数据直接叠加
根据文献中对传统相干累积算法的改进思路,这里对传统的查分累积进行了类似的改进,即先直接进行数据直接叠加操作,在进行相关运算。通过使用仿真GPS中频数据对改进后的捕获相关运算效果对比发现,对于相干累积算法,改进后的运算时间仅为传统算法的1/20,而捕获峰值略有下降;对于差分累积算法,改进后的运算时间为传统算法的1/10,而捕获峰值无明显变化。
3.2 捕获判决
由算法的捕获步骤可知,算法读取数据后实际是对一组10比特数据进行交替半比特相干累积,而导航数据比特翻转要么在奇数组数据中,要么在偶数组数据中。对于存在数据比特翻转的数据组,其最终捕获运算的结果幅值能量应当小于另外一组。对于捕获结果的判决采用成熟的tang搜索算法,其流程如图2所示。

当捕获程序对信号进行粗捕获,人为某一搜索单元可能存在卫星信号时,则使用tang搜索捕获算法,在同一搜索单元多次搜索对信号进行捕获判决。算初始时设定一初值K,对设定的一组数据进行多次捕获判决记录分析,当捕获幅值V超过捕获门限Vt时K值加1,否则K值减1,当K=A(A为一设定值)时,则人为该信号存在,并成功捕获;当K=0时,则人为该信号不存在,捕获失败。
3.3 差分码的快速构建
在使用差分相关算法进行捕获运算时,由于要构建新的差分码是捕获中新增的运算量,因而这里采用文献中的思想,基于块处理方法,利用常规数字匹配滤波器捕获结构进行新差分码的生成。在n和,n-1时刻CDMF输出表达式为:
![]()
其中,xi为接收到的数字信号,ai为本地伪码序列。由于本算法采用的是GPS基带数据保持不动、本地伪码序列作循环移位结构,故式(5)应改写为
![]()
由于C/A码的周期性可得a0=aN,两式相减,得到一个新序列为

显而易见,差分码di的取值范围只有+2、-2和0 3种,当差分码为0时,是不需要乘法运算的。在这里将差分码di中非零各项的位置和数值分别用pj和ej表示,其中j=1~k,K为差分码di(i=1~N)中非零项的个数。由文献的推导,差分码中数值为0的个数为2r-1-1(r为PN码生成多项式的阶数),所以本算法中所需乘法运算的次数K=2r-1,约为CDMF所需数量的1/2。特别是当每个码片采样为M点时,相乘累加运算量降低为常规方法的I/2M,大大降低了系统所需乘法器的数量。经过对GPS卫星32个C/A码序列的分别计算,K取值范围为480~544,与GPS中频信号采样频率和C/A码初始相位无关。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码